

微型结节软体机器人:会跳会飞还能把种子“钻”进土里
宾夕法尼亚大学团队利用可编程纤维和结的拓扑结构,打造出一种无需电子元件驱动的微型软体机器人,能在受热后猛烈跳跃、旋转、滑翔,并将附着的种子高压“打桩”式植入土壤。
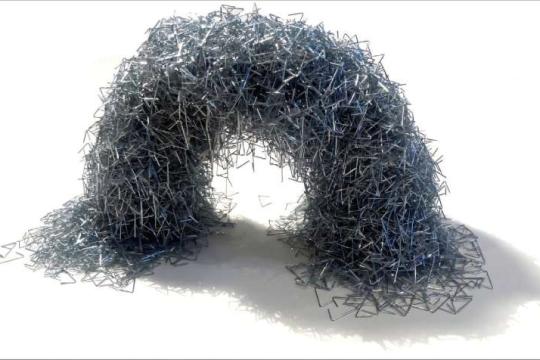
“液态金属”般的缠结订书针颗粒,或催生新一代可重构材料
研究团队用订书针状互锁颗粒,展示了一种既坚固又可快速解体的“缠结材料”,为可回收结构和新型机器人系统提供了全新思路。

魟鱼鳍运动研究为海洋机器人提供新思路:不同游动方式影响近底稳定性
加州大学河滨分校团队利用机器人鳍在水槽中模拟魟鱼游动,发现近海床环境下会出现“非稳态地面效应”导致负升力;微小姿态调整可消除该效应,波浪式起伏游动在近底保持高度方面表现更佳。






