

加州大学河滨分校(UC Riverside)研究人员通过一套机器人鳍实验,探究魟鱼在不同环境中如何实现精细的游动控制。研究团队表示,这些结果有望为水下航行器在接近海底作业时降低碰撞风险提供设计参考。
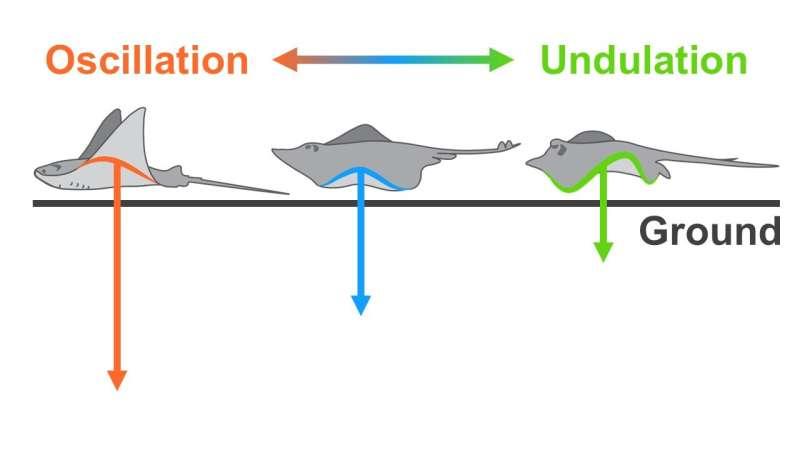
研究人员指出,野外魟鱼大致可分为两类:远离海底活动的远洋魟鱼(如蝠鲼),以及贴近海床活动的底栖魟鱼(如刺魟)。两类魟鱼的鳍运动方式存在差异:远洋魟鱼多以平滑、类似鸟类振翅的方式拍打鳍;底栖魟鱼则更常采用波浪式起伏的鳍运动。
加州大学河滨分校机械工程助理教授朱元航认为,这种差异可能不仅是外观上的不同,还可能与游动稳定性相关,并进一步影响其在各自栖息环境中的生存能力。为验证这一点,朱元航与合作者制作了可模拟魟鱼鳍运动的机器人鳍,并在一个用于模拟海洋流动的大型水槽中开展测试,测量不同运动模式对升力的影响。升力在实验中被定义为帮助个体保持水平或将其拉向海底的力。
相关研究已发表在《皇家学会界面杂志》(Journal of the Royal Society Interface)。
实验结果显示,在靠近海床时,魟鱼会经历负升力,即受到向下的吸引力。研究团队将这一现象归因于鳍的动态振荡所引发的“非稳态地面效应”,并指出这与鸟类或飞机在接近地面时因机翼相对稳定而受益于“气垫效应”的情况不同。
论文合著者、弗吉尼亚大学机械工程副教授丹尼尔·奎因表示,团队原本并不确定是否能测到不同游动方式带来的差异,因为魟鱼在海床附近可能出于多种与升力或推力无关的原因改变游动方式,但实验结果“非常显著”。朱元航也称,团队未预期到近地面时会出现额外升力,相反却观察到向下拉的效应。
研究人员进一步发现,真实魟鱼游动时会略微向上倾斜。当团队将机器人鳍的角度调整几度后,负升力随之消失。朱元航表示,这是一个幅度不大的调整,但带来的效果明显。
在对比不同运动模式时,团队还观察到,采用波浪式起伏游动的模型在近底保持离底高度方面优于单纯振荡拍打的模式。在模拟中,当机器人游动器在水槽底部附近被释放时,波浪式游动的机器人能更长时间保持水平姿态,而振荡游动的机器人更快与底部发生接触。
研究团队据此认为,魟鱼在不同栖息环境中形成的游动方式差异,可能与维持稳定性的需求有关。朱元航提出,未来仿生水下机器人或可在开阔水域采用类似蝠鲼的滑行方式,在接近海底时切换为更适合近底导航的波浪式游动,以支持海洋探索、监测或环境监控等任务。
研究人员强调,模仿魟鱼在低空(近底)保持水平的能力,可能帮助水下航行器减少与海底的碰撞风险。团队指出,即便短暂撞击也可能损坏传感器、折断鳍,或搅动沉积物导致摄像设备视野受阻;在需要隐蔽的水下任务中,保持距离海底仅数英寸的稳定高度可能影响任务成败。
奎因表示,该项目的结果不仅有助于理解底栖魟鱼为何采用不同的游动方式,也可能为魟鱼启发的机器人设计提供依据,例如用于海底测绘等用途。
该研究由朱元航与来自利哈伊大学、爱荷华州立大学的研究人员合作完成。朱元航所在实验室的更广泛研究方向为生物启发的推进技术。他表示,传统人造机器人往往难以同时兼顾在海洋中层的高效游动与近底环境的灵活机动,而通过观察魟鱼在波浪式与振荡式之间的调整机制,团队对其实现方式有了更清晰的认识。









