

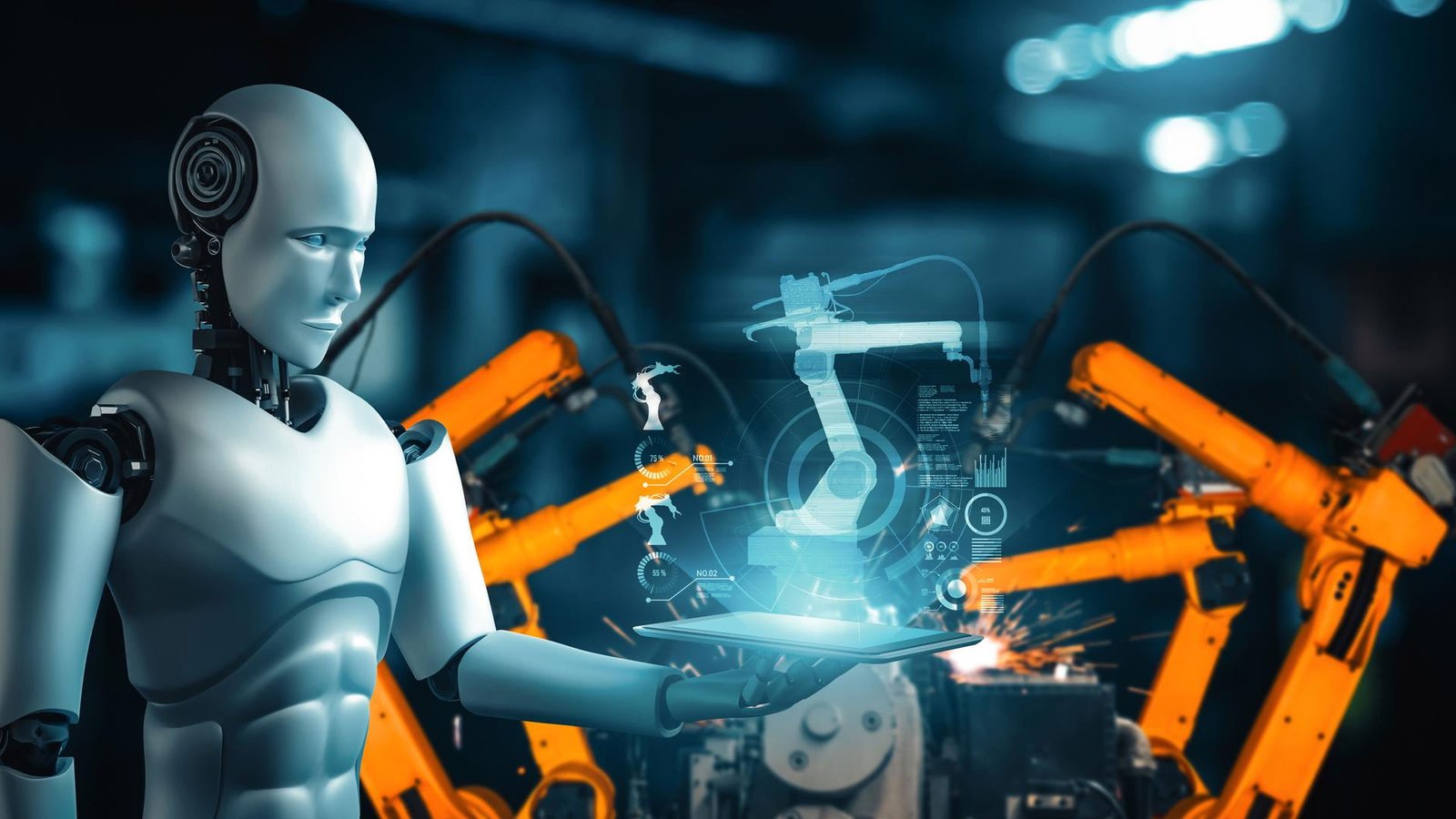
在CES 2026北馆企业AI专区,PaXini带来一场机器人触觉交互现场演示,吸引业内专家与媒体关注。演示中,人形机器人TORA-ONE完成了冰淇淋制作的完整流程,包括杠杆操作、原料处理以及杯子递交等环节,展示其自主执行任务的能力。
PaXini在展会期间集中展示其围绕高精度触觉感知与全栈具身AI的产品矩阵,涵盖全身6轴力/扭矩感知生态系统、多维触觉灵巧手、人形机器人以及全模态数据采集系统。
从指尖到全身:触觉与力控感知体系
PaXini介绍称,机器人灵巧操作依赖于精准感知,其全身6轴力/扭矩感知生态系统是相关能力的基础。用于手部感知的PX-6AX-GEN3多维触觉传感器覆盖三个产品系列共12款型号,在全量程内实现小于0.5%满量程的重复性,并可同时测量包括六轴力、材料纹理与弹性响应在内的15个感知维度。
除指尖触觉外,腕部与关节的力控同样是实现稳定操作的重要环节。PaXini在现场展示PX6D/PXTS,并称其为全球首款面向具身AI的商业霍尔效应6D力/扭矩传感器。该产品结合轻量化设计与传感器端智能,强调测量性能与动态响应,并以此实现更精准的全身力感知与稳定力控。
从感知到执行:多维触觉灵巧手
在将感知转化为动作的环节,PaXini展示DexH13多维触觉灵巧手。该灵巧手配备1140个ITPU多维触觉处理单元,可模拟多种人手手势,并在抓取不规则物体时保持稳定,现场展示的任务包括抓取试管、立方体以及执行旋钮旋转等精细操作。
人形机器人展示:触觉反馈与运动控制融合
作为触觉感知与执行能力的综合载体,PaXini的人形机器人在展区呈现多项交互与操作演示。TORA-ONE展示类人操作能力,包括接杯、分配以及晶圆拾放;TORA-DOUBLE ONE则展示更高阶的运动控制与交互能力,完成复杂障碍跨越,并通过握手与观众互动。
全模态数据采集系统:面向具身AI的数据供给
除硬件与机器人平台外,PaXini还在CES现场展示其全模态具身AI数据采集系统的精准复制品。公司表示,该系统旨在应对物理接触模态数据稀缺问题,提出“以人为本”的全模态数据采集方案,并称相较远程操作可显著提升数据采集效率;同时由于基于人体配置,具备更高的数据复用性与长期价值。
PaXini称其已具备年产近2亿条全模态数据的规模化生产能力,并计划通过云商店向全球开放相关资源。
生态闭环:触觉传感器、机器人平台与数据体系协同
PaXini表示,其围绕“触觉传感器—机器人平台—具身数据—场景应用”构建闭环,在CES 2026展示的不仅是单项技术,而是面向具身AI的基础设施组合方案。









