

四足危险物质侦测机器人:为消防高危任务“探路”
格拉茨工业大学主导研发的一款四足侦测机器人,可在危险环境中远程检测有害物质并实时回传数据,作为消防队的先遣力量参与高风险任务,提升安全性与处置效率。

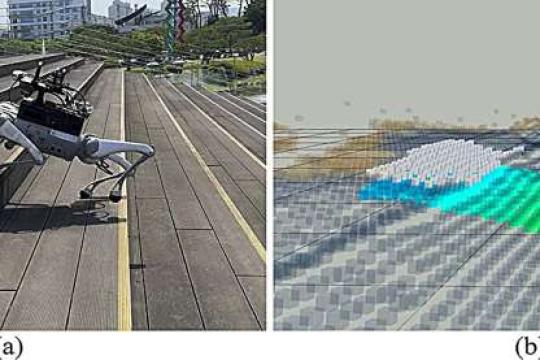
四足机器人“看懂”地形:自主识别危险、规划路线并越障搬运负载
KAIST团队推出四足机器人控制技术“DreamWaQ++”,在原有盲行能力基础上加入视觉与激光雷达感知,实现对复杂地形的主动识别、路径选择和越障行走。

人工神经网络成功模拟四足动物多种步态切换
布朗大学研究团队构建了一种基于吸引子网络的人工神经网络模型,仅用24个神经元就能生成并切换五种典型四足步态,为理解大脑如何控制复杂动态行为及发展更自主的四足机器人提供了新思路。

法拉第未来成立机器人子公司并推出三款具身智能产品
法拉第未来在拉斯维加斯NADA展会宣布成立FF EAI-Robotics Inc.,发布FF Futurist、FF Master与FX Aegis三款类人及四足机器人,并同步开启销售与预订,首批交付计划于2月底启动。






