

微型结节软体机器人:会跳会飞还能把种子“钻”进土里
宾夕法尼亚大学团队利用可编程纤维和结的拓扑结构,打造出一种无需电子元件驱动的微型软体机器人,能在受热后猛烈跳跃、旋转、滑翔,并将附着的种子高压“打桩”式植入土壤。


超薄聚合物薄膜驱动的新型真空泵技术
萨尔兰大学团队利用仅约人发厚度的介电弹性体薄膜,开发出无需电机、压缩空气和润滑剂的全新真空泵原型,可实现超薄、轻量、低噪声且可定制几何形状的泵设计。

机械计算机用弹簧与螺栓实现计数、奇偶判别和力记忆
圣奥拉夫学院与雪城大学团队在《自然通讯》发表研究,展示一套完全由机械元件构成、无需电源即可完成简单计算的机械计算机系统。
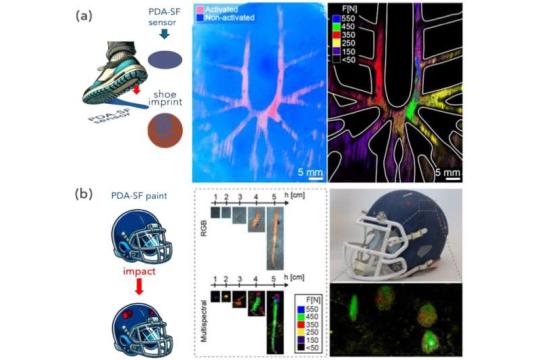
受击即显色:新型涂料可直观记录撞击位置与强度
塔夫茨大学团队开发出一种无需电子元件的智能涂料,受力后会永久变色,可定量显示撞击位置与力度,适用于头盔、防护装备、运输包装等多种场景。

隆德大学研究:湿度微变可驱动脂质分子在干燥界面重组,或启发智能材料与药物递送
瑞典隆德大学研究人员发现,环境湿度的细微变化即可促使脂质分子在不同膜结构间重新分布,从而影响皮肤、肺部与泪膜等屏障的保水与物质运输特性。相关成果发表于《美国国家科学院院刊》(PNAS)。
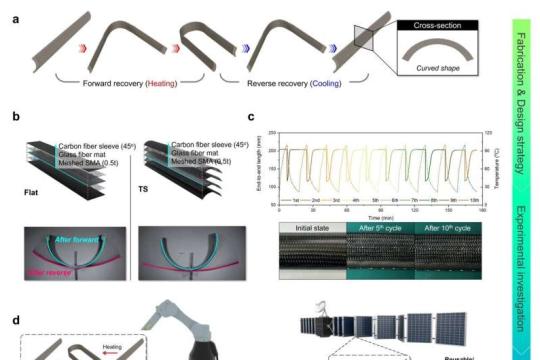
无需电机的机器人手:KAIST实现亚秒级变形智能驱动器
KAIST团队基于双向形状记忆材料,开发出无需电机、可在亚秒级完成双向变形的混合智能驱动器,为轻量化机器人抓手和空间展开结构提供了新方案。

类鸟振翅机器人:以固态智能材料实现更灵活的无人机飞行
罗格斯大学工程师开发出一种利用压电智能材料驱动的固态类鸟振翅无人机,无需传统马达和齿轮即可实现翅膀拍打与扭转,为复杂环境中的高机动飞行和未来应用奠定基础。

声波远程“重写”材料刚度:从植入物到机器人肌肉的潜在新工具
加州大学圣地亚哥分校、密歇根大学与法国CNRS勒芒大学团队提出一种利用特定频率声波,远程、可控地移动材料内部机械折点,从而按需调节材料局部软硬分布的新方法。
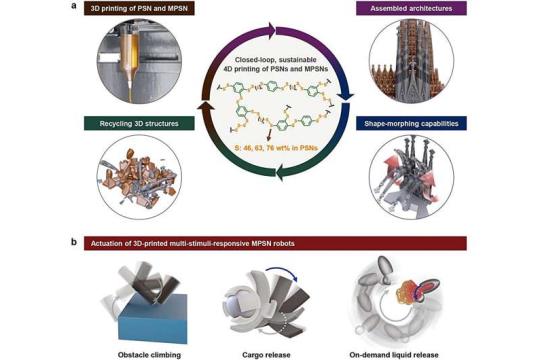
利用废硫的多响应4D打印:自驱动软体机器人新路径
韩国研究团队基于富硫聚合物,开发出可响应热、光和磁场的4D打印技术,实现自驱动软体机器人与材料全回收,为工业硫废料高值利用提供新方案。






