

虽然空间展开结构和机器人手臂都需要轻量、可重复运动的驱动装置,但传统依赖电机的系统往往体积大、重量高、结构复杂,限制了应用场景。韩国科学技术院(KAIST)研究团队提出了一种基于智能材料的新型驱动技术,无需电机即可在不到一秒内完成快速动作,为下一代机器人和空间展开结构提供了新的技术路径。
由机械工程系金成洙教授带领的团队开发出一种“基于双向形状记忆材料的混合智能驱动器”,具备“可逆自我形状变化”能力。该驱动器能够在外部刺激(如温度变化)作用下发生形变,并在不依赖复杂机械结构的前提下自动恢复到初始形状。
相关研究成果已发表在期刊《Advanced Functional Materials》上。
智能材料如何驱动运动
研究团队设计了一种混合复合驱动器,将形状记忆合金(SMA)与形状记忆聚合物(SMP)结合使用,以同时发挥两类材料的优势。
- 形状记忆合金:在加热后可以恢复到预设原始形状的金属材料;
- 形状记忆聚合物:在热或其他外部刺激作用下发生形变,并在特定条件下恢复形状的聚合物材料。
传统形状记忆材料存在明显局限:
- 很多材料只能单向变形,变形后难以主动恢复;
- 即便可以恢复,过程往往较慢;
- 金属合金与聚合物刚度差异较大,长期反复使用时容易导致形状恢复不精确。
这些问题使得形状记忆材料在高频、精确的双向驱动应用中难以直接使用。
材料与结构的双重改进
为突破上述瓶颈,研究团队从材料本身和结构设计两方面入手进行优化。
在材料层面,他们通过调整形状记忆聚合物的化学组成,并引入碳纤维增强,使其刚度显著提升,更适合作为驱动结构的一部分。
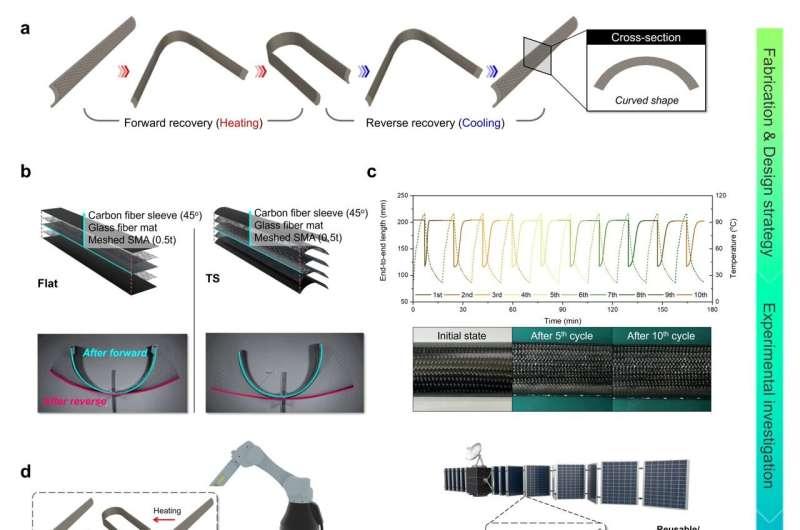
在结构层面,团队在驱动器中引入类似卷尺的“带弹簧”结构。该结构在变形过程中可以储存弹性能量,并在特定时刻瞬间释放,形成类似“弹跳”的快速动作。这种设计显著提高了驱动过程的速度和定位精度。
性能表现与应用前景
实验结果表明,新型驱动器实现了完整的双向驱动:
- 加热时,驱动器发生弯曲;
- 温度降低后,又能恢复为接近平坦的初始状态。
同时,该驱动器展现出:
- 明显扩大的形变范围;
- 接近 100% 的初始形状恢复率;
- 显著提升的恢复速度。
在无需复杂控制系统的条件下,驱动器即可实现稳定的反复动作。这意味着其在实际工程系统中集成难度较低,有利于规模化应用。
研究团队指出,这一形状记忆驱动器在三个关键指标上实现了突破:双向变形能力、亚秒级驱动速度以及高部署精度,被视为形状记忆材料驱动技术走向实用化的重要进展。
金成洙教授表示:“我们通过原创性的结构设计,突破了材料本身的物理限制,将形状记忆驱动器的性能推向了新的水平。未来,这项技术有望应用于需要高频重复运动的机器人抓手,以及空间应用中的展开结构等多个领域。”
本研究的第一作者为博士生姜大正,他在项目中承担了核心研究工作。









