
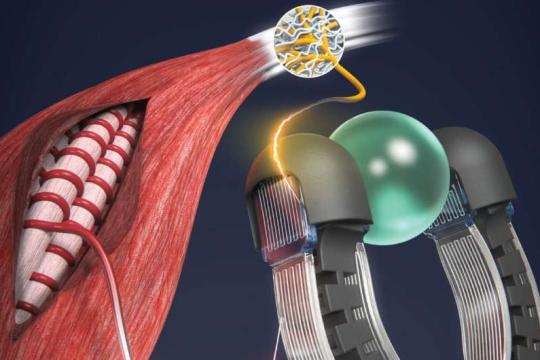
集成感知与驱动的智能人工肌肉,为类人机器人带来新突破
研究团队仿生肌肉-肌腱复合体结构,在液晶弹性体中嵌入液态金属通道,开发出可同时驱动与感知的“智能人工肌肉”,有望应用于下一代类人机器人与软体机器人。


微型结节软体机器人:会跳会飞还能把种子“钻”进土里
宾夕法尼亚大学团队利用可编程纤维和结的拓扑结构,打造出一种无需电子元件驱动的微型软体机器人,能在受热后猛烈跳跃、旋转、滑翔,并将附着的种子高压“打桩”式植入土壤。
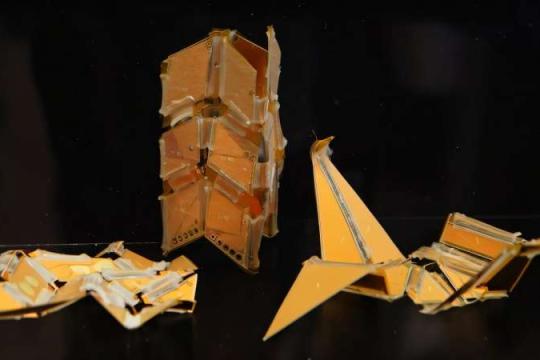
折纸启发的可打印聚合物软硬混合机器人:以电流驱动精准变形
普林斯顿团队利用液晶弹性体、柔性电子与折纸结构,打造无需电机和外部气动系统即可运动的可打印软体机器人,实现可重复、可编程的精确变形。






