
研究团队近日开发出一种可同时实现感知与驱动功能的“智能人工肌肉”,设计灵感来自生物的肌肉-肌腱复合体。该人工肌肉在液晶弹性体(LCE)内部嵌入液态金属通道,能够在电刺激下产生收缩,并同步测量自身内部的力和长度变化。
这种结构使人工肌肉可以像生物肌肉一样,同时处理运动信号(类似躯体神经系统)和感知信号(类似感觉神经系统),在一个单一系统中完成驱动与感知的协同。研究团队认为,这项成果在机器人驱动技术上具有突破意义,尤其适用于下一代类人机器人。相关论文发表在《Advanced Materials》期刊,并被选为封面文章。
近年来,从类人机器人到物流自动化系统,再到康复与辅助医疗设备等多个领域,对能够精细操控物体、感知外界环境并以类人方式安全交互的驱动技术需求快速上升。
然而,传统人工肌肉和机器人驱动器通常将驱动与感知功能分离,需要额外安装传感器并配合复杂的控制系统,增加了系统体积、成本和控制难度。因此,业界一直在寻找一种能够在材料层面集成感知与驱动的新型“智能驱动材料”。
新型人工肌肉的工作机制
为应对上述挑战,首尔国立大学工学院朴永来教授团队开发出一种基于LCE的人工肌肉,将感知与驱动功能集成在同一结构中,整体设计借鉴了生物肌肉-肌腱复合体的构造。研究团队认为,这一成果通过在材料本身中实现“物理智能”,为机器人驱动提供了新的技术范式。
该人工肌肉由单一连续结构构成,其中等方性LCE与向列性LCE两种具有不同特性的部分串联连接,分别扮演类似“肌腱”和“肌肉”的角色。在内部嵌入的两条液态金属通道中,一条作为主动驱动单元,通过电加热引发收缩;另一条作为传感单元,用于精确检测力和形变。凭借这种设计,系统能够在内部实时感知自身收缩状态,并同步输出运动,无需额外外部传感器。
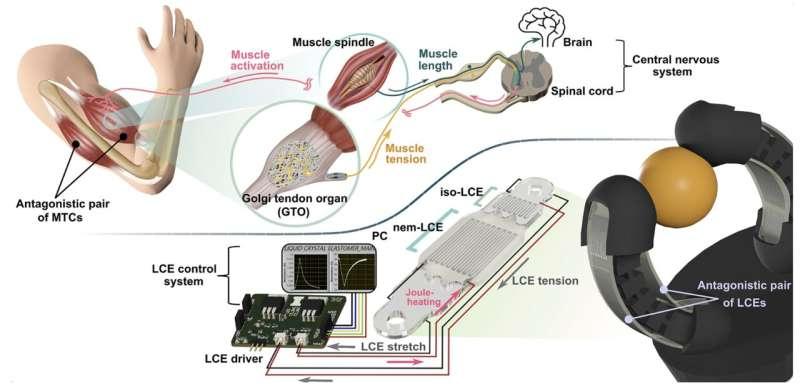
研究团队进一步展示了搭载该人工肌肉的机器人手指和夹持装置的性能:它们可以对物体进行精细抓取,并能自主区分被抓取物体的刚度和尺寸。尤其是,当将两条人工肌肉以拮抗方式成对布置、朝相反方向工作时,可实现对收缩与放松的精确调控,从而获得快速且高精度的驱动响应。
应用前景与后续研究方向
朴永来教授表示,这项研究开发的人工肌肉在结构和功能上高度仿生,使机器人能够以更灵活、更敏感的方式与环境进行交互。预计该技术将在类人机器人、医疗与康复设备以及软体机器人等领域展现广泛应用潜力。
目前,朴教授团队正在继续优化人工肌肉的结构设计,并研究主动冷却技术,以提高人工肌肉的冷却速度,从而进一步改善其响应频率和工作效率。
论文第一作者赵智妍目前为首尔国立大学机械工程系博士生,正开展人工肌肉自动化制造方面的后续研究。她计划在完成博士学位后,以博士后研究员的身份继续深耕相关领域。










