像动物般游动与导航:无需控制系统的微型3D打印机器人
莱顿大学研究团队利用3D微型打印技术,打造出无需传感器、软件或外部控制即可自主运动的柔性微型机器人。它们仅依靠自身结构与环境相互作用,实现游动、感知和导航,行为方式与生命体极为相似。

微型合成游动器首次在复杂流体中实现自主导航
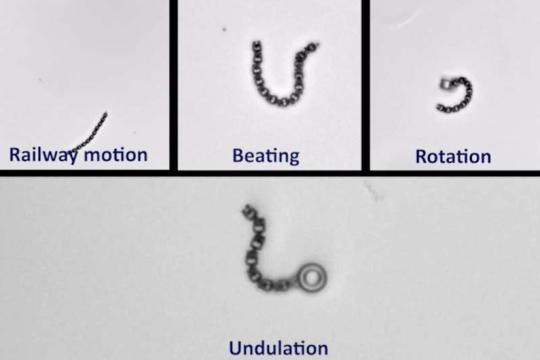
莱比锡大学团队首次证明,微米级合成微游动器可以依靠自身形状“感知”环境,在快速变化的复杂流体中实现无需传统传感器的自主导航,为体内靶向给药等医疗微机器人应用提供了新思路。

莱顿大学研究团队利用3D微型打印技术,打造出无需传感器、软件或外部控制即可自主运动的柔性微型机器人。它们仅依靠自身结构与环境相互作用,实现游动、感知和导航,行为方式与生命体极为相似。
莱比锡大学团队首次证明,微米级合成微游动器可以依靠自身形状“感知”环境,在快速变化的复杂流体中实现无需传统传感器的自主导航,为体内靶向给药等医疗微机器人应用提供了新思路。






