

莱顿大学的丹妮拉·克拉夫特教授和魏孟石带领团队,研制出一类无需传感器、软件或外部控制就能运动的微型机器人。它们的行为完全由自身形状以及与周围环境的相互作用所决定。
这些机器人长度只有几十微米,比人类头发的宽度还要小得多,却能够在液体中游动、感知周围环境、进行导航并作出适应性反应,其表现与微小生命体极为相似。而这一切都不依赖“大脑”或电子控制系统。
这项成果为未来的生物医学应用打开了新的方向,相关研究已发表在《美国国家科学院院刊》(PNAS)上。
灵感来自自然界
研究团队的设计思路源于自然界中的动物。克拉夫特解释说:“像蠕虫和蛇这样的动物,在移动时会不断改变身体形状,从而更好地在环境中穿行。大型机器人也常通过柔性结构实现复杂功能。但在微观尺度上,以往的微型机器人要么体积小但刚性强,要么柔性好却体积偏大。我们想看看,能否在实验室中实现既小又柔软的微型机器人。”
关键参数与结构
研究人员最终设计出一种由多个自驱动单元通过柔性连接段串联而成的链状结构,并利用3D微型打印技术将其制造出来。其主要特征包括:
- 结构形式:由自驱动单元通过柔性铰链连接形成的链状结构
- 材料来源:合成材料,在实验室中使用 Nanoscribe 3D 打印机打印
- 单元尺寸:每个自驱动单元约 5 微米
- 铰链尺寸:连接处铰链约 0.5 微米
- 运动方式:依靠自驱动单元产生运动
- 运动速度:约 7 微米/秒
微小、柔性,却具备“生命感”的行为
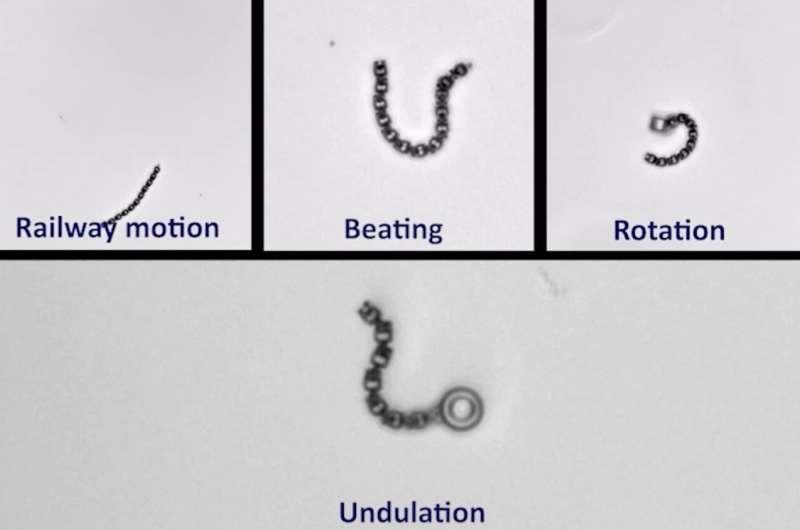
在完成设计后,团队利用3D微型打印机制造出这些柔性链状机器人。出乎意料的是,当施加电场后,这些链条开始自行运动和游动。由于结构具有柔性,它们在液体中前进时呈现出类似生物体的姿态和动作。
在测试过程中,研究人员观察到许多有趣现象。魏孟石回忆:“当机器人减速甚至停下来时,它会开始摆动尾部,看起来就像在努力挣脱束缚。这是因为后部单元仍在尝试继续运动,而柔性结构让这种行为得以表现出来。”
克拉夫特补充说:“更重要的是,我们发现机器人形状与运动之间存在持续的反馈:形状会影响它如何运动,而运动又会反过来改变它的形状。这样一来,机器人就能‘感知’环境对其身体造成的影响,并作出相应反应,看起来就像是有生命的系统。这意味着,我们无需在其中集成微型电子元件,也能实现某种形式的‘智能’行为。”

魏孟石进一步说明:“当我们的微型机器人遇到障碍物时,它会自动改变路径寻找新的通道。当两个机器人相遇时,它们会自然地彼此避让。”这些机器人甚至可以在较为拥挤的环境中穿行,并将阻碍其运动的小颗粒或物体推开或移走。
未来研究方向与潜在应用
这种能够在复杂环境中自主导航的微型机器人,为生物医学领域带来了多种潜在应用前景,例如:
- 靶向药物输送,将药物精准运送到特定组织或病灶区域;
- 微创医疗操作,在微小空间内执行局部干预;
- 诊断用途,通过在体内或微流控系统中运动,协助检测或采样。
克拉夫特表示:“接下来,我们需要系统地理解这种动态且具有功能性的行为是如何产生的。掌握其背后的物理机制,将有助于我们设计出更复杂、更高性能的微型机器人和装置,同时也能加深我们对生物微型游动体以及微小生物体物理学的认识。”









