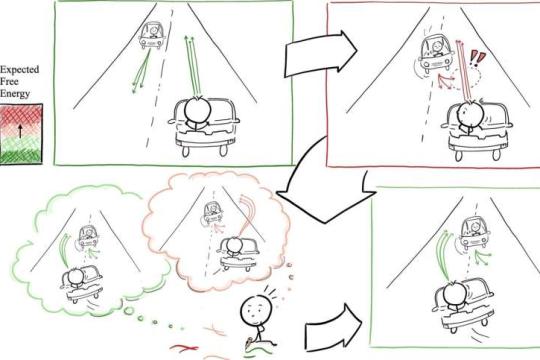
Waymo推出虚拟驾驶员模型,用于评估自动驾驶汽车的避撞能力 科学 2026-06-16 Waymo与代尔夫特理工大学合作开发了一个基于主动推断框架的虚拟“参考驾驶员”模型,用于在仿真环境中测试自动驾驶系统在近碰撞情境下的反应表现。