

自动驾驶车辆已经在部分城市道路上投入试运行,并被视为未来交通系统的重要组成部分之一。与所有车辆一样,安全性始终是首要考量。为更好地评估并优化其自动驾驶技术,美国无人驾驶汽车公司 Waymo 开发出一个虚拟驾驶员模型,用来模拟人类驾驶员在接近碰撞时的行为反应。
人类驾驶员在面对突发危险时,会在极短时间内完成一系列过程:感知风险、做出决策并执行相应操作,从而尽量避免事故。这依赖于中枢神经系统与周围神经系统的协同工作,使得感知、判断和动作几乎在瞬间完成。
目前,针对碰撞避免的测试和训练通常依赖多个独立系统,每个系统往往只覆盖某一类场景或单一指标。例如,有的系统只评估前车突然急刹时的应对表现。这类方法难以完整还原从危险被发现到车辆成功避让的整个动态过程。
行为“碰撞测试假人”
在发表在《自然通讯》上的一篇论文中,Waymo 介绍了其与荷兰代尔夫特理工大学研究团队合作开发的一个基于计算机的认知模型——ReD(参考驾驶员,Reference Driver)。该模型基于一种名为“主动推断”的神经科学理论框架,用于模拟人脑在避免意外事故时的内部处理机制。
在传统汽车行业中,制造商会使用实体碰撞测试假人来评估乘员在事故中的受伤风险。而 ReD 则被形容为一种“行为碰撞测试假人”,用于评估自动驾驶汽车在多大程度上能够主动避免碰撞,而不是仅在碰撞发生后保护乘员。
与实体假人不同,ReD 并不安装在真实车辆中,而是完全运行在计算机仿真环境里。为了验证模型的可靠性,研究人员将 ReD 在虚拟场景中的驾驶行为与真实道路上的人类驾驶数据进行了对比。
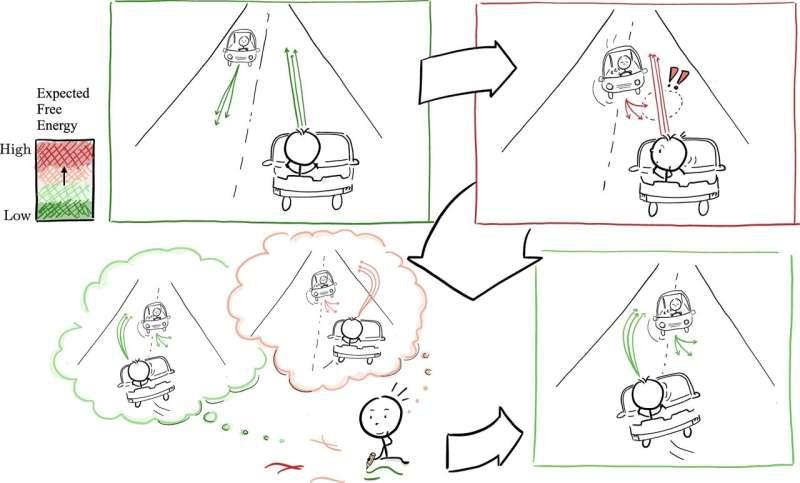
在一系列虚拟碰撞情境测试中,研究团队发现,ReD 能够成功再现人类驾驶员在三种典型场景下的反应模式:
- 前方车辆突然紧急制动;
- 对向车辆意外驶入本车道;
- 交叉路口中,另一辆车未按规则让行。
论文作者指出:“我们的结果表明,主动推断有潜力成为理解和模拟复杂真实驾驶任务中人类行为的通用框架。”
未来应用与发展方向
研究团队的长期目标,是将 ReD 作为一种数字化基准,用于在虚拟环境中系统性地测试自动驾驶汽车的避撞能力。当前研究已经证明,该模型可以在若干典型交通场景中较好地复现人类驾驶员的行为,但距离全面应用仍有不少工作要完成。
论文中提到,后续研究将致力于:
- 将 ReD 扩展到更加复杂、多变的驾驶环境;
- 提升模型对更广泛真实交通情境的适应能力;
- 在更多类型的近碰撞场景中验证其稳定性和泛化表现。
随着模型不断完善,类似 ReD 的虚拟驾驶员有望成为自动驾驶系统开发和验证流程中的关键工具,为提升自动驾驶车辆在真实道路上的安全表现提供重要参考。
© 2026 Science X Network









