

从鸟群整齐变换队形,到学生协作完成小组作业,任何群体要顺利运作,都离不开协调、沟通与信任——每个成员都必须相信其他成员会可靠地履行职责。如今,越来越多由机器组成的连接网络也面临同样的问题:从自动驾驶网约车车队到智能电网,这些系统正在快速走入现实世界。
哈佛大学的计算机科学家联合多所高校的信息理论、无线通信、优化、机器学习和机器人领域专家,提出了一个将“信任”系统性纳入新一代网络物理系统的愿景。由哈佛约翰·A·保尔森工程与应用科学学院(SEAS)John L. Loeb工程与应用科学副教授、Kempner研究所副成员 Stephanie Gil 领衔的新论文,给出了一个基础框架,帮助多智能体连接系统在采取行动前判断应信任哪些信息。
Gil 是发表在《IEEE学报》论文的合著者之一。她指出:“网络物理系统将会无处不在。问题在于,我们如何保障这些系统的安全?如何确保它们在真实世界中具有足够的弹性?这正是我们需要从互联网安全发展历程中汲取的经验。”
用“Cy-trust”量化可信度
论文提出了“cy-trust”这一概念:即为一个自主智能体(如车辆或机器人)在决策时应当多大程度信任另一个智能体或数据流,提供定量衡量方式。研究团队认为,构建这样的信任框架,是未来打造安全、可靠连接系统的关键基础。
传统网络安全基础设施主要聚焦于保护软件和数据不被滥用或窃取,核心问题是“谁有权访问系统”。但对于需要持续实时协同的机器人、车辆或智能设备集群,Gil 及其同事认为,仅靠这些传统防护远远不够。
论文系统梳理了多智能体网络物理系统特有的威胁。例如:
- 个别智能体出于恶意或“自私”行为破坏整体协调——如一辆自动驾驶车为抢道突然加速插队,造成危险合流;
- 众包交通地图中被注入虚假或篡改数据,黑客借此恶意改道车流;
- 在搜救任务中,一部分被入侵的智能体伪造自身位置,谎称在某处,从而在监控覆盖中制造“盲区”。
这些情况都可能在物理世界引发真实伤害:导致事故、威胁行人安全,甚至危及应急救援人员。但论文也强调,这类“具身”系统有一个重要优势:每个智能体本身都配备了传感器和计算能力。
Gil 与合著者提出,可以利用车载摄像头、激光雷达、雷达、GPS 等传感器,对来自其他智能体或云端的信息进行交叉验证,将其作为内建的信任评估机制。同时,通过对接收到的无线通信信号进行信号处理,每辆车或每个机器人可以验证数据的物理来源。
研究设想中,每个智能体会根据传感数据、环境信息、网络行为以及历史交互经验等线索,为其他智能体的数据打出 0 到 1 之间的信任分。这些分值决定每条信息在其决策过程中的权重。例如,在网约车车队中,如果某辆车的信任分偏低,其他车辆就可能降低对其信息的依赖,甚至直接忽略,以防整个系统被拖入不安全状态。
Gil 表示:“这个 ‘cy-trust’ 概念与我们熟悉的心理信任有明显相似之处。心理信任本质上是在信息不完全、存在不可避免风险的环境中,仍然选择承担一定风险并做出决策的一种机制。”
在实验室中验证 Cy-trust
Gil 已经在其实验室中开始验证这些想法。
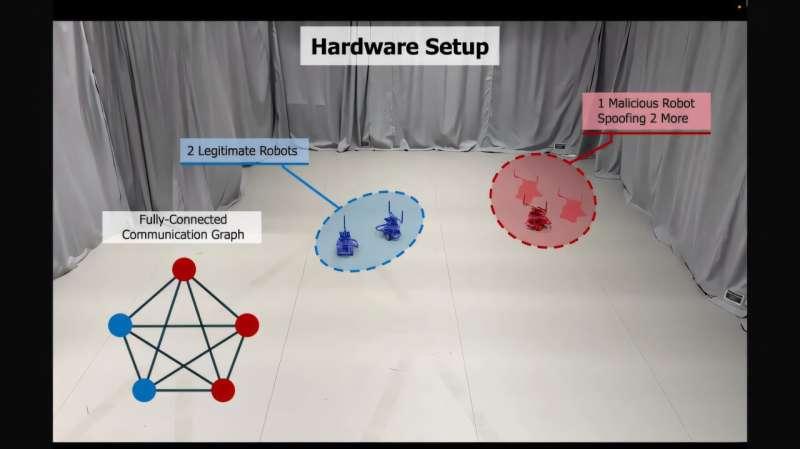
在一组实验中,一队蓝方机器人代表合作智能体,目标是达成某种共识——例如确定统一航向,以便作为车队协同行动;另一队红方机器人则扮演攻击者,通过制造多个虚假身份发动“Sybil 攻击”,试图扰乱网络。
在常规设置下,联网机器人往往会无差别接收所有消息,并运行标准的分布式共识或优化算法,因此容易受到此类攻击。红方机器人可以通过伪装成多个智能体或伪造位置,引导团队做出不安全或低效的集体决策。
在 Gil 的实验中,每个蓝方机器人不仅接收无线消息,还会对物理无线信号进行处理,判断看似来自多个不同智能体的消息是否实际上出自同一物理源头。基于这些分析结果,系统为每个“智能体”生成相应的信任分。
随着时间推移,系统逐渐学会识别潜在的恶意智能体,并在共识或优化过程中降低甚至忽略其输入,从而让蓝方机器人仍能顺利完成既定集体任务。
研究团队还强调,要让 cy-trust 真正发挥作用并获得公众认可,必须将其纳入政策与监管框架之中,尤其是在自主协同系统快速扩张的背景下。目前,自动驾驶网约车车队已经在凤凰城和旧金山等城市投入运营;卡车编队和自动车队正在被积极开发,用于优化供应链;自动化仓库(如亚马逊履约中心)已经在受控环境中高度依赖机器人车队。Gil 认为,将这类系统进一步推向开放世界,是令人期待且合乎逻辑的下一步。
论文合著者、石溪大学校长 Andrea Goldsmith 表示:“这篇关于为网络物理系统赋予信任能力的跨学科综述论文可谓‘恰逢其时’。当我们迈入一个众多物理系统由云端 AI 控制、由多智能体协同运作的时代,我们迫切需要一个严谨的设计框架,来确保这些系统在面对恶意智能体时依然安全可靠。我们的论文为设计安全、稳健的协作多智能体系统,提供了当前最前沿技术与未来研究方向的全面路线图。”









