

机器人和电子设备的迅速普及,正在给环境带来越来越沉重的负担。根据联合国训练研究所(UNITAR)的统计,2022年全球产生的电子废弃物约为 6200 万吨,其中相当大一部分没有被有效收集或回收,而是被直接填埋或焚烧处理。
随着软体机器人在医疗、农业和环境监测等领域的应用不断扩大,报废的机器人系统正逐渐演变为新一代电子垃圾的重要来源。尤其是软体机器人及其配套电子系统,通常由热固性聚合物弹性体、金属合金以及外源半导体构成多层薄膜结构。这类多种异质材料的组合几乎无法实现有效回收,也难以在自然环境中降解,引发了人们对其长期可持续性的担忧。
为应对这一问题,由首尔国立大学姜承均教授、西江大学金相燏教授以及约翰内斯开普勒林茨大学马丁·卡尔滕布伦纳教授共同领导的 SNU–Sogang–JKU 联合团队,开发出一种完全可生物降解且可堆肥的软体机器人电子系统。该系统在使用阶段具备高性能和高耐久性,完成任务后则能够彻底回归自然环境。
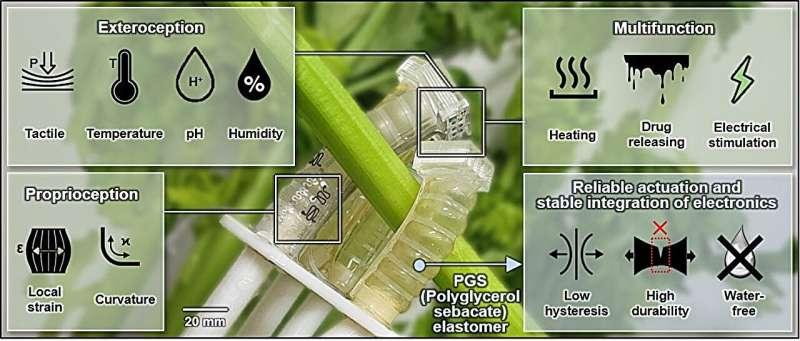
研究团队选用无水可生物降解弹性体聚(甘油癸二酸酯)(PGS)作为机器人框架的结构材料,构建出低滞后、弹性恢复性能优异的软体驱动器。相关成果发表在《自然可持续性》期刊上。
基于 PGS 的弯曲驱动器展现出出色的耐久性:在经历超过一百万次驱动循环后,其弯曲角度和输出力几乎没有衰减,且在长期存储后性能依旧稳定。研究团队还将由镁(Mg)、钼(Mo)和硅(Si)构成的可生物降解无机电子元件集成到系统中,包括曲率、应变、触觉、温度、湿度和 pH 传感器,以及加热器、电刺激器和药物输送模块,从而构建出一个高度集成、多功能、可降解的电子软体机器人手指平台。
当整个机器人系统置于工业堆肥条件下时,其结构框架与电子元件会在数月内逐步分解。利用分解后获得的堆肥进行植物生长实验表明,该堆肥对环境无毒害影响,可安全用作植物养料。
在应用演示中,研究人员展示了通过焦耳加热实现的枝条修剪功能(左),以及用于植物处理的药物输送系统(中、右)。相关图片刊载于《自然可持续性》(2026),DOI: 10.1038/s41893-026-01780-4。同时,首尔国立大学工程学院也发布了软体机器人手指生物降解过程的图像资料。
姜承均教授表示,这项研究突破了传统可生物降解材料在性能和寿命方面的限制,证明软体机器人及其电子系统在保持实用耐久性和功能性的同时,也可以实现完全可持续,为未来机器人技术树立了新的标杆。
金相燏博士补充指出,通过在同一平台上兼顾高性能、完全生物降解和生态安全,这一技术有望成为推动机器人和电子设备向环境友好方向转型的关键基础。
研究团队认为,这一成果为应对机器人和电子设备废弃物日益增长的全球性难题提供了一个从源头出发的解决思路,开启了智能机器在完成使命后回归土壤、以自然一部分而非废弃物身份“谢幕”的新范式。









