

随着热成像摄像头在自主无人机和自动驾驶车辆上的广泛应用,如何防止这些设备被恶意干扰、误判环境,成为一项关键安全问题。佛罗里达大学的一位工程学教授正致力于确保这类摄像头不会被“伪造”的热信号所欺骗,从而错误地“看到”并不存在的物体。
佛罗里达大学计算机与信息科学与工程系(CISE)的助理教授 Sara Rampazzi 博士及其团队的研究表明,基于热成像的感知系统在可靠性和安全性方面远不如人们此前设想的那样稳健,尤其是在自主机器人和空中无人机执行安全关键任务时的障碍物规避场景中。
热成像摄像头通过感知热量差异而非可见光来成像,因此在夜间、雾天、烟雾或降雨等普通摄像头难以工作的条件下依然能够运行。这类传感器帮助机器在低能见度环境中识别人类、动物以及各种障碍物。
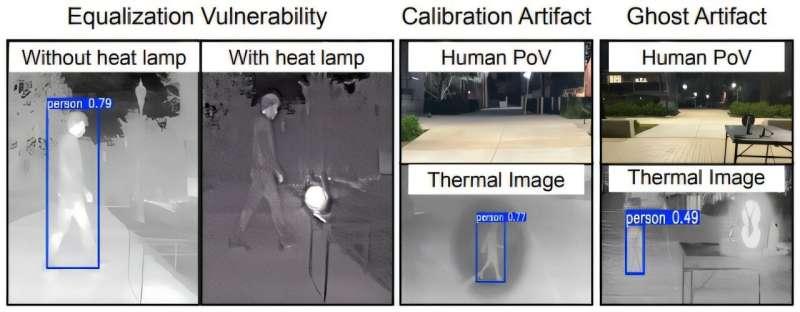
这项研究由 Rampazzi 的博士生 Sri Hrushikesh Varma Bhupathiraju 在 2026 年网络与分布式系统安全研讨会(NDSS)上发表。团队发现,热成像摄像头在图像处理过程中存在三类此前未被公开的漏洞,分别与图像均衡、传感器校准以及镜头特性相关。
这些漏洞可以被环境中自然存在的热源,或是攻击者有意放置的热源所触发,从而改变摄像头感知到的相对温度分布,或生成具有误导性的图像数据,最终干扰系统对障碍物的正确识别与规避。
研究指出,通过利用摄像头内部的专用光学组件以及专有信号处理算法,攻击者可以让无人机或机器人的感知系统“看不见”真实存在的障碍物或人类目标,或者凭空制造出并不存在的虚假障碍物,从根本上欺骗热成像摄像头。
值得注意的是,这类攻击不需要对系统进行黑客入侵,也无需与设备发生物理接触。
攻击利用的是摄像头传感器本身及其构建图像的内部机制中的固有弱点,而不是直接篡改摄像头输出的数据流。
“我们发现的问题全部源自传感器内部,因此当数据被无人机或车辆使用时,其实已经在源头被操控了。”Rampazzi 表示,“我们评估了制造商在摄像头中部署的最先进算法和软件,结论是这些方案在安全性方面仍需加强。”
为降低这些风险,研究团队设计了防御性信号处理技术,能够主动识别并抑制那些“看起来像某个物体”但实际上只是恶意或误导性热信号的异常读数。
这些防御策略具有足够的灵活性,可以在实时条件下运行。通过访问并调整设备内部的算法,Rampazzi 团队的工具可以检测并过滤出由可疑热源引起的传感器读数,然后对修改后的算法进行系统性测试,以验证其有效性。
要全面刻画这些效应,需要在真实热成像数据集上进行大量实验,远超传统硬件平台的处理能力。因此,研究人员借助了佛罗里达大学的超级计算机 HiPerGator。
“HiPerGator 的并行处理能力让我们能够高效地运行海量实验,模拟多种攻击场景,并在大规模上分析模型行为。”Rampazzi 说,“HiPerGator 对于理解和量化这些漏洞,以及验证它们在真实环境中的影响至关重要。”
对 Rampazzi 而言,这项研究不仅是揭示系统和产品中的缺陷。团队还认真地将研究结果披露给相关制造商,希望对方能够据此改进其专有算法,提升产品的整体安全性。
不过,无论制造商是否采纳这些建议,Rampazzi 并不指望会收到明确回应——相关公司通常对其专有技术保持高度保密。









