

微型机器人因尺寸极小而被视为实现微观尺度精确操控的潜在工具。尤其在水环境中,单个细胞或细菌等生物对象的定向处理长期面临如何在可控条件下实现“有针对性操作”的挑战。
研究人员近日展示了一种可被精确控制的纳米级“微观清洁器”。相关研究已发表在《自然通讯》(Nature Communications)上。论文显示,这类纳米机器人能够实现对细菌的受控操作,包括收集与重新定位。

该工作的核心难点在于为微小设备提供动力并实现操控。维尔茨堡尤利乌斯-马克西米利安大学(JMU)Bert Hecht教授团队此前提出利用单个光子的反冲力驱动微米级装置(被称为“微型无人机”)的方法:装置集成最多四个等离激元纳米天线,可吸收特定颜色与螺旋性的光并定向再发射;每个被重新定向的光子都会产生反冲力,类似枪械后坐力。由于装置质量极小,反冲可带来明显加速度与速度。

在最新研究中,团队将该类光驱动机器人进一步微型化至小于1微米。研究人员通过简化操控机制,在不影响基于光子反冲推进的前提下实现更小尺寸。

研究还利用了机器人内部纳米天线会倾向与入射光偏振方向对齐的特性。通过调控光的偏振,研究人员可改变纳米机器人的朝向,而推进仍由光子反冲提供。团队将这一操控方式类比为宏观车辆的转向。
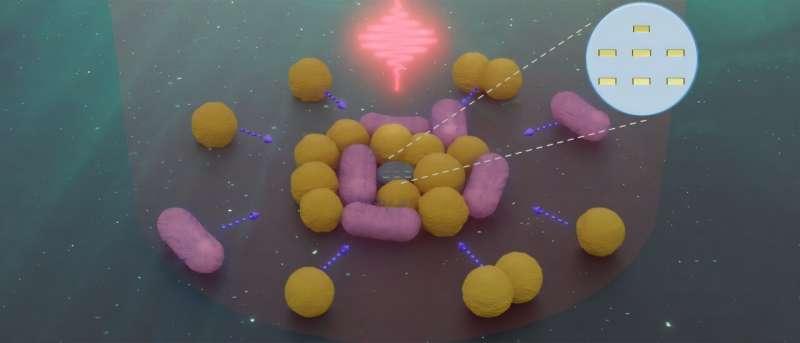
据论文介绍,这些纳米机器人可在样本中进行快速90度转弯,从而系统、高效地扫描较大区域,并可选择性捕获、运输与释放大量细菌。在受控实验室条件下,它们可通过收集细菌并将其置于指定位置,实现对微观环境的“清洁”。
研究主要实验科学家秦晋表示,团队制造的光驱动纳米机器人能够追踪并收集细菌,简化设计后使其尺寸可直接在微生物尺度环境中运行。Hecht则称,该研究展示了光不仅可用于观察微观世界,也可用于主动塑造微观世界的物理原理。
研究人员还指出,即使在运输较大细菌团簇时,纳米机器人仍可保持机动性,但速度会略有下降。论文认为,这种表现显示其在微生物学、生物医学研究及微观尺度定向操控方面具备潜在应用价值。









