

研究称海豹主动摆动胡须可增强水下踪迹感知,或为机器人传感提供思路
格罗宁根大学团队利用软致动器模拟海豹胡须运动,发现主动“挥动”有助在敏感度与能耗间取得平衡,并可用于更安静、节能的机器人感知与导航方案。


气动仿生人工肌肉:让机器人举起自重百倍并适应极端环境
亚利桑那州立大学团队开发出新型气动仿生人工肌肉,可在高温、粗糙环境下稳定工作,并让软体机器人举起自身重量的100倍,同时无需外接电源。

超轻声纳与人工智能助力微型无人机像蝙蝠般在黑暗中导航
研究团队开发出一种受蝙蝠回声定位启发的超声波感知系统,结合物理降噪与神经网络,让微型无人机在黑暗、烟雾和尘埃等低能见度环境中也能安全导航。

受蝙蝠启发的超声导航:掌上无人机可在雾霾与烟雾中自主飞行
伍斯特理工学院团队利用超声波与深度学习,让掌上大小的无人机在低功耗、低算力条件下穿越雾霾、烟雾等复杂环境,为未来搜救任务提供新型导航方案。
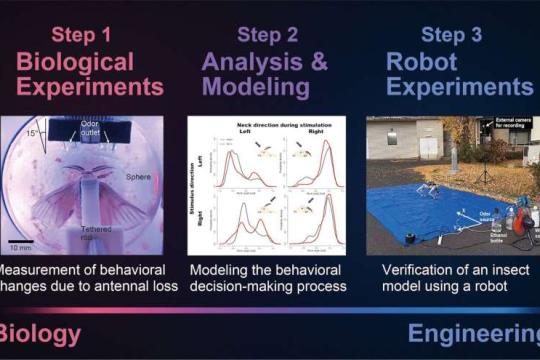
受昆虫启发的新型机器人:单侧“触角”也能精准锁定气味源
研究团队基于蚕蛾的导航机制,构建出一种在单侧传感器失效时仍能稳定追踪气味源的仿生机器人系统,并在室内外复杂环境中验证了其鲁棒性。

类鸟振翅机器人:以固态智能材料实现更灵活的无人机飞行
罗格斯大学工程师开发出一种利用压电智能材料驱动的固态类鸟振翅无人机,无需传统马达和齿轮即可实现翅膀拍打与扭转,为复杂环境中的高机动飞行和未来应用奠定基础。






