

一个合作研究团队构建出一套基于昆虫行为的仿生机器人系统,即便两个气味传感器中的一个失效,仍能在室内和室外环境中稳定、准确地锁定气味源。参与该研究的成员包括国立信息学研究所(NII)助理教授重木俊介、东京理科大学工学院教授仓林大辅,以及东北大学工学院副教授大脇大。
蚕蛾启发的韧性导航机制
研究以蚕蛾(Bombyx mori)为生物学原型。蚕蛾即使失去一侧触角,仍能保持有效的气味导航能力。团队将这一生物学现象背后的行为策略抽取出来,并融入机器人设计中,提出了一种构建具备韧性、自主导航能力系统的新框架。相关成果已于 2026 年 2 月 9 日发表在期刊《npj Robotics》上。
许多生物都会利用气味(化学物质)线索来寻找目标。昆虫虽然大脑体积小、神经系统结构相对简单,却能快速捕捉风中弥散的气味分子,并朝着食物或潜在配偶的方向移动。围绕气味引导导航的研究,长期以来一直是神经科学、遗传学和动物行为学等领域的交叉热点。
近年来,如何将这些复杂的生物行为原则迁移到机器人系统中,受到越来越多关注。能够感知并追踪气味源的机器人平台,被寄予在灾害救援、危险物质与爆炸物检测、环境监测等场景中发挥关键作用的期望。
突破传统气味机器人对称设计的限制
现有大多数气味引导机器人系统在设计时,默认左右两侧气味传感器功能对称且完好无损。然而在真实应用环境中,传感器可能出现故障或物理损伤,导致一侧感知输入缺失,从而严重削弱气味源定位能力,甚至使系统完全失效。此前尚未有机器人系统能在这种非对称感知条件下,依然保持稳定的气味追踪性能。
为应对这一问题,本研究提出了一个新的设计框架,从生物体的适应性行为中汲取灵感,使机器人在感知不对称甚至部分失效的情况下,仍能实现稳健的气味源定位。
在实验中,研究人员选用成年的雄性蚕蛾作为模型生物,分析其在性信息素引导下的气味源追踪行为。在触角完整时,蚕蛾通过头部两侧的双触角获取空间分布的嗅觉信息,从而精确判断气味源方向。
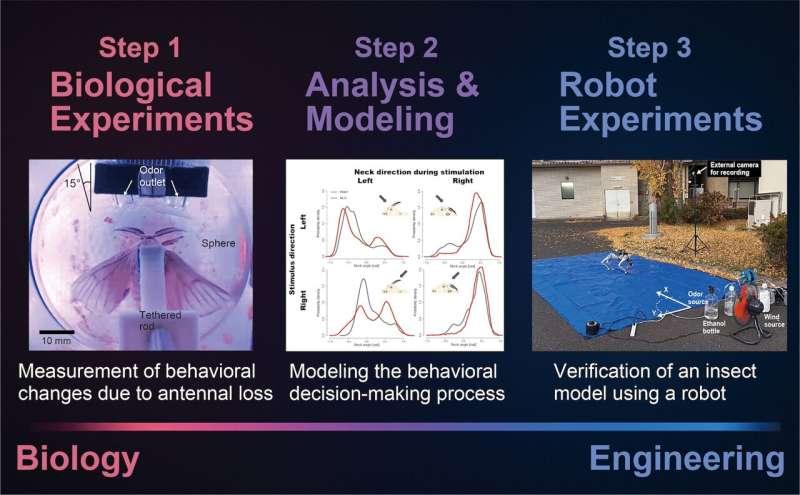
行为实验进一步显示,即便失去一侧触角,蚕蛾仍能仅依靠剩余触角的嗅觉输入,通过合适的行为选择与调整,高精度地到达气味源。结果表明,蚕蛾会动态整合单侧触角检测到的气味位置信息与自身当前航向角,并根据环境变化灵活更新行为决策过程。
在真实机器人平台上的验证
为了检验这一行为决策机制在工程系统中的通用性与有效性,研究团队将从蚕蛾提炼出的感知—运动策略嵌入到一台配备类似蚕蛾嗅觉传感系统的机器人平台中。随后,他们在可控的室内环境以及更为复杂的户外环境中开展了气味源定位实验。
实验结果表明,即使在双侧传感器中有一侧失效时,机器人仍能维持与传感器完好状态相近的定位表现。这一结论在室内环境和受强风、湍流等干扰显著的户外环境中均得到验证。受昆虫启发的适应性策略,使机器人在搜索成功率和搜索效率方面都保持在较高水平。
这些结果说明,在感知部分受损的前提下,仍有可能实现稳定可靠的气味引导导航,而这一直是传统气味定位算法难以解决的难题。
对未来自主系统设计的意义
本研究在仿生机器人领域迈出了重要一步,将昆虫的行为原理有效转化为可工程实现的控制策略。与此同时,该工作为具备长期自主探索能力的机器人平台提供了关键设计思路,尤其适用于灾害响应以及其他复杂、动态的现实环境应用。
通过从蚕蛾等生物的韧性导航行为中汲取灵感,未来的自主系统有望在传感器受损、环境干扰强烈等不利条件下,依然保持可靠的任务执行能力。









