

机器人“肌肉”升级:更轻、更强、更适应极端环境
亚利桑那州立大学的研究人员正在研发新一代仿生机器人“肌肉”,让机器人能够在沸水中工作,经受粗糙表面的磨损,跨越阻碍传统电机驱动机器人的复杂地形,并实现举起自身重量100倍的能力。这类新型机器人有望更轻、更小,并且无需持续连接外部电源即可运行。
这项研究由亚利桑那州立大学机器人执行器与动力学实验室开展。博士生 Eric Weissman 是论文《通过解耦各向异性实现多功能人工肌肉》的第一作者,论文发表在《美国国家科学院院刊》(PNAS)上。实验室主任、亚利桑那州立大学伊拉·A·富尔顿工程学院物质、运输与能源工程学院助理教授孙杰峰为共同作者。
Weissman 表示:“我们本质上开发了一种新型人工肌肉,用来模仿生物肌肉。此前已有仿生肌肉技术,但我们让它们变得更通用、更轻便,同时更强大。”
目前许多四足机器人依赖电机驱动,整体结构偏重,灵活性有限,运动能力受到明显制约。对此,团队提出了新的解决方案。
HARP 执行器:像“螺旋意面”的气动人工肌肉
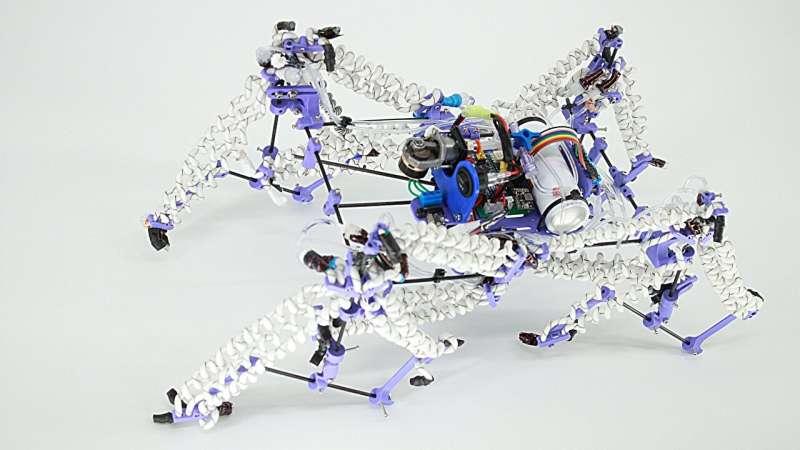
Weissman 开发的螺旋各向异性增强聚合物(HARP)执行器,能够模拟自然肌肉的收缩与舒张。这类执行器柔软、极轻且运行安静,非常适合用于软体机器人。相同重量下,它们能举起的负载远超传统电驱动执行器。
“Weissman 形容:“这些肌肉看起来像卷曲的空心管子,形状类似带肋的螺旋意大利面 cavatappi。当我们注入少量空气时,它们就会产生膨胀和收缩。”
由于具备多功能性和良好适应性,团队显著降低了驱动所需的气压,从而可以制造出无需外接电源、可自带全部必要组件并实现独立行走的机器人。
研究团队并非只针对单一任务设计某一种仿生肌肉,而是提出了一个可扩展的技术框架,能够根据不同需求和低成本场景进行定制。
Weissman 介绍:“在灾难响应中,软体机器人可以钻入废墟或倒塌建筑内部搜寻幸存者。它们柔软的身体可以挤进狭小缝隙,同时避免对结构造成进一步破坏。在家庭环境中,它们也可以安全地协助老年人完成日常活动,比如取放物品和帮助处理简单家务。”
由于 HARP 执行器能够耐受高温,它们还可用于工业高温清洗流程,或在海洋热液喷口附近执行探测和样本采集任务。其柔韧性和旋转抓握能力也使其非常适合农业和工业场景中的抓取与操作。
目前,该团队已通过亚利桑那州立大学 Skysong Innovations 提交了临时专利申请。
仿生大象臂:能伸、能绕、能探的软体机械臂
在孙杰峰实验室的另一项研究中,博士生王佳禾开发了“仿生大象臂”——一种受大象鼻子灵活性和精细操作能力启发的软体机器人手臂。
这款仿生机械臂可以轻松越过、绕过或探入障碍物,尤其适合在工业环境中执行检查和操作任务。其轻质结构与天然柔顺性不仅降低了对周围设备造成损伤的风险,也提升了在近距离人机协作场景中的安全性。
王佳禾解释:“在化工厂或拥挤的生产线上,很多设备位置难以触及,而且对碰撞非常敏感。即便是简单的检查工作,也可能需要停机,造成昂贵且耗时的停工成本。”
在农业领域,较细版本的仿生大象臂可以穿梭于植物之间,协助完成授粉,这类工作通常需要大量人工投入。与会产生强气流、容易扰动作物的无人机不同,软体机器人可以更温和地接近和操作植物。
较粗版本的仿生大象臂则可应用于太空环境,帮助宇航员维护设备或递送工具。由于其结构柔软灵活,在人员和精密仪器周围使用时更安全,可避免轻微碰撞引发的连锁问题。
孙杰峰补充:“像草莓、番茄这类作物的叶冠非常密集,授粉者很难在其中穿行。软体机器人手臂可以深入这些密集区域完成授粉任务,同时绕开途中遇到的障碍。”
新型背部支撑装置:轻便可调的混合式设计
在另一项相关研究中,博士生 Rohan Khatavkar 在孙杰峰和副教授 Hyunglae Lee 的共同指导下,开发了一种新型背部支撑装置(BSD)。该装置旨在减轻工业场景中搬运重物等任务对腰背造成的过度负担,也可为背部肌肉较弱的人群提供支撑,帮助预防跌倒。
Khatavkar 介绍:“传统的主动式 BSD 由电机驱动,可以根据具体任务调节辅助力度,但它们通常体积大、重量重,对身体有功能限制的人来说佩戴并不舒适。被动式装置虽然更轻便紧凑,却无法根据任务需求灵活调节。”
在最新版本中,Khatavkar 团队通过并联组合主动与被动元件,寻求两者之间的平衡。该装置采用弹性执行器和气动人工肌肉,实现可调节的辅助机制。
他表示:“新装置既紧凑轻便,又具备调节辅助力的能力。我们可以根据不同任务需求进行设定。采用软材料的改进版 BSD 不仅进一步减轻了重量,还集成了可调刚度模式和不同力级设置,在不需要辅助时可以关闭支撑功能,而无需完全摘下装置。”
未来展望:从农田到太空的柔性机器人
展望未来,孙杰峰认为,仿生人工肌肉在农业、工业、医疗、手术、家务、园艺等众多领域都具有广阔的应用前景,甚至在不远的将来,太空探索也将从中受益。
他指出:“最终,我们可以在各种机器人系统中采用这些更柔软、更灵活、更顺应环境的肌肉装置。它们体积更小、重量更轻,也不会像传统刚性机器人那样存在夹伤风险。”
“通过使用航天级材料,我们能够为宇航员及其随行机器人设计出具备更高机动性、敏捷性和运动便利性的设备。”









