

研究:部分加拿大人愿意尝试昆虫食品,但纳入日常饮食比例较低
康考迪亚大学研究团队在蒙特利尔对252名成年访客调查发现,44%受访者表示愿意尝试昆虫食品,但仅27%愿意将其作为日常饮食的一部分。受访者更偏好昆虫成分不可见的粉末类产品,厌恶感仍是主要障碍。

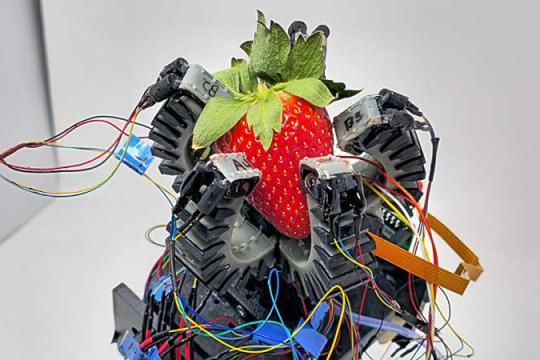
软体机器人夹持器:用“触觉”无损采摘成熟果实
康奈尔大学团队利用可拉伸光纤传感器,打造出一款具备精细触觉的软体机器人夹持器,可通过触感判断草莓成熟度,并在不损伤果实的前提下完成采摘,为更具韧性和生态友好的农业生产提供新工具。

哈德逊谷粮食主权基金评估:预付款与公平补偿机制改善区域粮食体系
纽约市立大学研究人员评估Glynwood区域粮食与农业中心的粮食主权基金,称该模式提升农民收入与生产力,并增强社区获取健康且具文化意义食品的能力。

日本理研研究:减少化学农药或提升土壤微生物多样性,但果实病害风险上升
日本理研可持续资源科学中心团队基于日本12个县商业柑橘果园样本,采用逆概率加权等统计方法评估农药与化肥类型影响。结果显示,降低化学农药使用与叶部病原体相关的果实病害增加相关,同时土壤微生物多样性提高、土壤病原体减少。






