

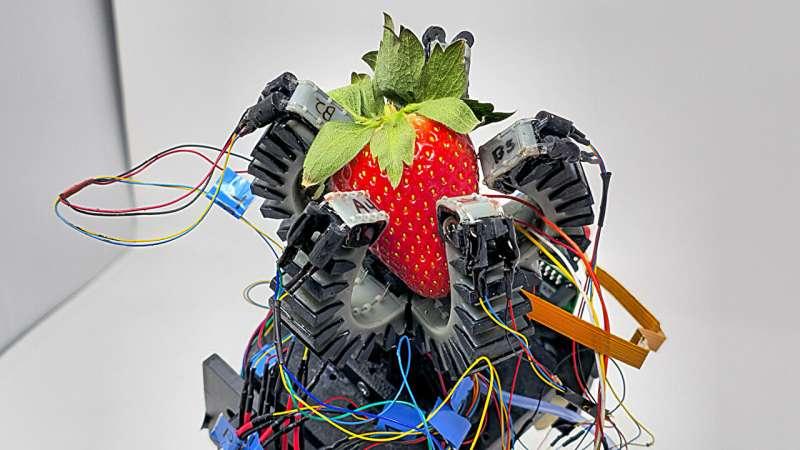
在判断水果是否成熟时,人们通常依赖视觉和嗅觉,但真正关键的往往是手指触碰到果实时的感觉。康奈尔大学的研究人员利用可拉伸光纤传感器,开发出一款软体机器人夹持器,能够通过“触觉”预测草莓的成熟度,并将其轻柔地从枝条或藤蔓上扭下,而不会对果实造成损伤。
这项技术由康奈尔大学达菲尔德工程学院机械工程系约翰·F·卡尔教授 Rob Shepherd 领导的实验室完成,有望推动更具韧性、更加生态友好的食品生产方式,并提高那些种植难度较高水果品种的供应量。
相关研究成果发表在《自然通讯》(Nature Communications)期刊上,论文第一作者为前博士后研究员 Anand Mishra。
Shepherd 领导的有机机器人实验室此前已经展示了可拉伸光纤传感器在软体机器人系统中的应用潜力,这类传感器可以赋予机器人类似人类的动态触觉能力,帮助其在复杂自然环境中进行感知和导航。近几年,团队将这一技术延伸到农业场景,设计出一种软体机器人夹持器,可以向活体植物叶片中注入传感器,从而帮助机器人感知并与周围环境进行交互。
为了研发一套既能评估成熟度又能温和处理水果的系统,Shepherd 团队与康奈尔大学农业与生命科学学院园艺与全球发展教授 Marvin Pritts 合作。Pritts 长期研究浆果作物的可持续生产方法,为该项目提供了作物与种植方面的专业支持。
在训练和测试这款夹持器时,研究人员需要一种合适的“模型水果”,最终选择了草莓。
“Shepherd 表示:“草莓是否成熟,从颜色上就能非常准确地判断。我们可以先用颜色作为标准,再训练模型通过触觉来判断成熟度,然后用颜色结果来验证模型的准确性。Anand 能够根据测得的硬度,精确估计出采摘草莓的最佳时机。”
这款软体机器人夹持器本身也十分“柔软”。夹持器内部集成了两类光纤传感器:一类用于测量手指的弯曲程度,另一类用于感知指尖压力。通过这两种信息,机器人可以推断出被抓取物体的形状,并自动调整握持力度,实现对成熟果实的无损抓取。
“Shepherd 解释说:“光纤应变计的机械特性与夹持器本体是一致的。可以理解为,是夹持器自己的‘肉体’在直接感受水果,而不是依赖额外安装的独立传感器。”
为了在采摘过程中进一步减少损伤,研究人员还为系统设计了行星齿轮机构:当夹持器抓住果实后,机器人手腕可以进行旋转,将草莓轻轻扭下,而不是直接拉扯或硬摘,从而避免对果实和植株造成拉伤和破坏。
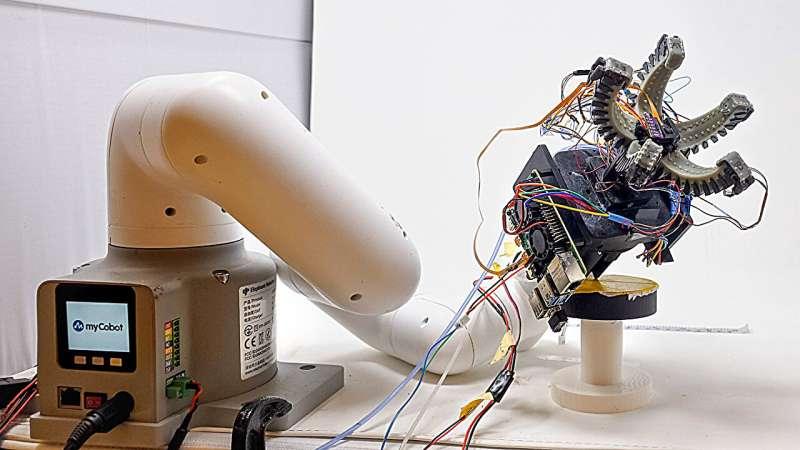
在仅靠触觉不足以完成判断的情况下,团队还在夹持器掌部安装了一枚摄像头,用于寻找被叶片或其他植被遮挡的果实。对于那些成熟度难以通过外观判断的水果,这种触觉与视觉结合的方式尤其有价值,例如鳄梨、菠萝,或者 Shepherd 最喜欢的番木瓜。
他举例说:“番木瓜的问题在于,你几乎看不出它什么时候成熟,而且一旦成熟,速度非常快,如果没在合适的时间采摘就会错过。它们也不适合长途运输,在运输过程中很难保持完好。这也是超市里很少见到番木瓜的原因之一。而这项技术有望帮助解决这些问题。”
研究团队认为,这一技术对推动可持续农业实践的影响可能更为深远。
“Shepherd 指出:“机器人可以让我们实现许多目前在经济上难以做到的事情。我们之所以普遍采用行作物种植,是因为这种方式适配现有的大型机械。但如果我们拥有数量更多、体型更小的机器人,就有机会实现多样化的混合种植,让不同物种之间形成互相支持的生态结构。”
“在这种模式下,你不必今年种大豆、明年种玉米,而是可以在同一块地里同时种植它们。你也可以种植具有抗病虫害能力的间作物,帮助阻挡虫害,从而减少农药和化肥的使用,还能通过合理配置冠层植物来提升抗旱能力。
“以这种方式管理农场本身非常复杂,”他补充道,“而机器人技术可以让这种复杂管理真正变得可行。”









