

新研究:提升机器人灵巧性关键在于示范一致性而非算法复杂度
研究表明,相比依赖复杂规划或海量多样数据,为机器人提供稳定、一致的合成示范,更有助于其学会类人灵巧操作。

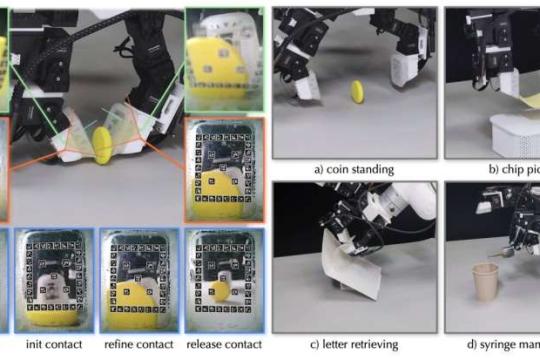
FingerEye桥接触觉与视觉,增强机器人接触前后操作能力
FingerEye是一种集成双目视觉与柔性触觉结构的新型传感器,可在接触前、接触中和接触后持续提供感知信息,从而显著提升机器人在复杂灵巧操作任务中的表现。

基于意图的模仿学习:让不同形态机器人也能“互相传授技能”
研究团队提出“意图对齐模仿学习”(IAIL)方法,用自然语言描述的高层意图来对齐不同形态机器人的行为,使它们能够跨平台共享技能并协作。
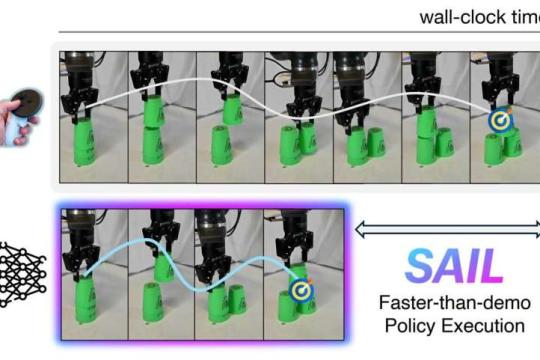
AI加速模仿学习:机器人学技能已能超越人类示范速度
佐治亚理工学院团队提出SAIL系统,让通过模仿学习训练的机器人在保持精度与安全的前提下,以远高于人类示范的速度完成复杂类人任务。






