

机器人正在通过观察人类来掌握新技能。从叠衣服到处理食材,许多现实世界中的类人操作过于细致复杂,难以用传统的逐步编程方式高效实现。
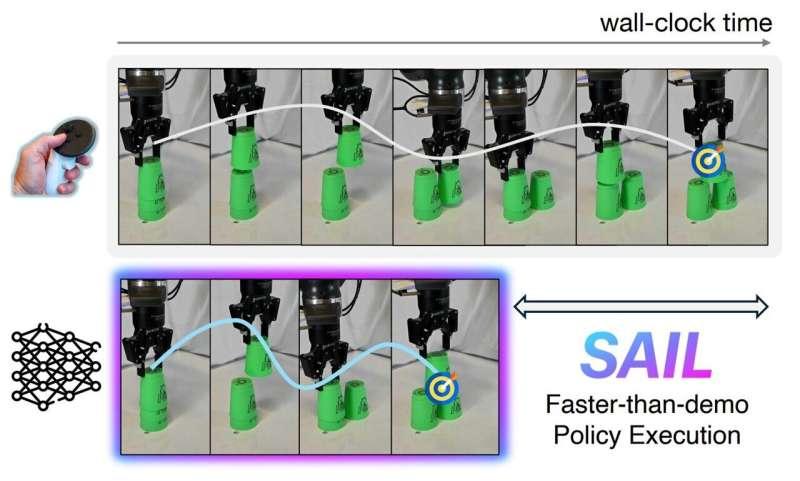
借助模仿学习,人类先演示任务,机器人再通过摄像头和传感器记录并学习这些动作,然后尝试复现。这一方法已成为机器人研究的前沿方向,但也存在明显瓶颈:机器人通常只能以接近人类示范的速度执行任务,难以进一步提速。
佐治亚理工学院的研究人员近日提出了一种新工具,打破了这一速度限制。该系统让机器人在不牺牲精度、控制和安全性的前提下,以显著快于人类示范的速度完成复杂操作。相关成果已发布在 arXiv 预印本平台上。
研究团队聚焦于现代机器人学中的一个核心问题:如何把“从人类学习来的灵活性”与“现实应用所需的高速度和高可靠性”结合起来。这项技术有望推动模仿学习在工业生产和家庭服务中的落地应用,甚至让机器人在某些类人任务上表现得比以往更好。
“我们想要打造的——我认为整个业界也在追求的——是那种通用机器人:只要是人类双手能做的事,它都能做。”乔治·伍德拉夫机械工程学院助理教授、该研究的联合负责人 Shreyas Kousik 表示,“要让这种机器人真正走出实验室,速度是关键因素之一。”
这套新工具名为 SAIL(Speed-Adapted Imitation Learning,速度适应模仿学习),源自佐治亚理工校园内一次跨学科合作,汇集了机械工程、机器人系统和机器学习等领域的专家。团队成员包括 Kousik、佐治亚理工研究院高级研究科学家 Benjamin Joffe、互动计算学院助理教授 Danfei Xu,以及来自多个实验室的研究生和研究人员。
速度提升而不牺牲稳定性
让机器人在超过人类示范的速度下工作并不容易。高速运动会放大系统的不确定性,环境中细微的变化都可能导致动作失败。
“难点在于,机器人往往被训练数据所限制,只要环境稍有不同,就可能出错。”Kousik 解释说。
SAIL 采用模块化设计来应对这一问题。系统由多个子模块协同工作,在超出原始训练数据范围的情况下实现加速:
- 在高速下保持动作连续和平滑;
- 精确跟踪目标运动轨迹;
- 根据任务复杂度动态调整执行速度;
- 通过合理安排动作顺序来补偿硬件延迟。
这些机制叠加在一起,使机器人能够在快速运动时仍然保持稳定、协调和精确。
“我们观察到一个明显的差距:学术界的机器人系统可以完成非常炫目的任务,但在速度和鲁棒性上,往往还达不到真实场景的要求。”Joffe 说,“我们希望系统性地分析这一差距,并设计出一个端到端的解决方案。”
他补充道:“目标不仅是让机器人跑得更快,还要让它足够聪明,知道什么时候加速是有利的,什么时候则会增加出错风险。”
研究团队在仿真环境和两个实体机器人平台上,对 SAIL 在 12 项任务中的表现进行了评估。这些任务包括:叠放杯子、折叠布料、摆盘水果、包装食品以及擦拭白板等。
在大多数任务中,启用 SAIL 的机器人完成任务的速度是传统模仿学习系统的三到四倍,同时保持了与原系统相当的准确性。
唯一的例外是擦白板任务。由于该任务需要持续保持与白板表面的接触,在高速下执行更容易失去稳定性,因此加速空间有限。
“弄清楚什么时候加速有益、什么时候加速反而有害,这一点非常关键。”Kousik 指出,“在某些任务上,适当减速才是正确的选择。”
向“学得快、做得快”的机器人迈进
目前,SAIL 并不能让机器人具备完全通用的适应能力,但它标志着一个重要进展:机器人可以从人类那里学习技能,却不再被人类的动作速度所束缚。
通过展示如何在保证安全和可控的前提下系统性地加速已学得的机器人行为,SAIL 让模仿学习更接近真实应用场景——在这些场景中,速度、精度和可靠性同样重要,缺一不可。









