
声纳与摄像融合系统助水下机器人穿透浑浊水域
MIT 与 WHOI 工程师开发出 Sonar-MASt3R 技术,将声纳与光学成像实时融合,使水下机器人在浑浊、低能见度环境中也能构建高精度三维地图并安全导航。

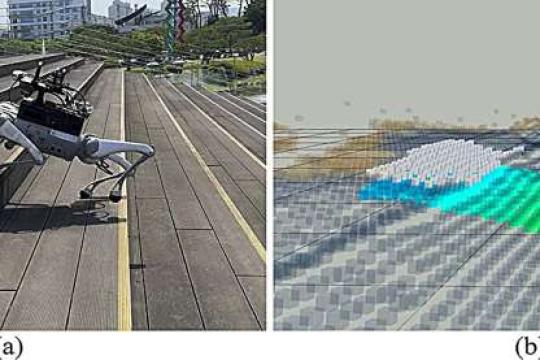
四足机器人“看懂”地形:自主识别危险、规划路线并越障搬运负载
KAIST团队推出四足机器人控制技术“DreamWaQ++”,在原有盲行能力基础上加入视觉与激光雷达感知,实现对复杂地形的主动识别、路径选择和越障行走。

MIT 与 WHOI 工程师开发出 Sonar-MASt3R 技术,将声纳与光学成像实时融合,使水下机器人在浑浊、低能见度环境中也能构建高精度三维地图并安全导航。
KAIST团队推出四足机器人控制技术“DreamWaQ++”,在原有盲行能力基础上加入视觉与激光雷达感知,实现对复杂地形的主动识别、路径选择和越障行走。






