

对于远程操控的水下机器人而言,浑浊、湍流的水域一向是高风险区域。当机器人停在海底或在沙床上作业时,往往会扬起大量沉积物,形成“泥沙云”,机载摄像头几乎看不清前方环境。通常只能被迫等待沉积物慢慢沉降,才能继续安全前进。
麻省理工学院(MIT)与伍兹霍尔海洋研究所(WHOI)的工程师团队近日提出一项新的水下测绘技术,有望让机器人在低能见度水域中也能“看清”周围环境。
这项方法将光学摄像头采集的图像与声纳传感器的声学数据进行融合。通过先利用声纳在浑浊水域中快速勾勒出环境的大致几何形状,再引导机器人靠近特定目标区域,随后由光学摄像头在近距离补充细节信息,从而实现对周围物体位置和形态的精细识别。
研究团队形象地将其比作:把海豚的回声定位能力与海龟的近距离视觉结合起来,使机器人能够在浑浊水中实时感知和导航。
在实验中,研究人员在一座可调节水体能见度的水箱内测试了该系统。即便在最浑浊的条件下,系统仍能穿透沉积物云,对水箱环境进行建图,并分辨出水箱中厘米级物体的细节特征。
团队将这项技术命名为 Sonar-MASt3R,并正持续优化。他们希望未来能利用该方法,引导水下机器人在浑浊环境中安全作业,服务于科学考察、水下工程维护以及深海打捞等多种应用场景。
“我们希望这项工作能让我们在那些能见度极低、操作困难的环境中完成更多任务,覆盖目前难以进入的区域。”麻省理工学院航空航天系研究生、项目负责人 Amy Phung 表示。
Phung 已在本周于维也纳举行的 IEEE 国际机器人与自动化会议(ICRA 2026)上报告了 Sonar-MASt3R 的详细研究成果。论文合著者为 WHOI 应用海洋物理与工程高级科学家 Richard Camilli。相关论文也已发布在 arXiv 预印本平台上。
光学与声纳的互补
在水下观测中,研究人员通常在光学摄像头和声纳传感器之间做选择。光学摄像头可以提供高分辨率的视觉图像,但前提是水体较为清澈且光照条件良好。相比之下,声纳在清澈和浑浊水域中都能稳定工作,通过发射声波并测量其返回时间和角度,精确估计物体的距离、深度和轮廓,但声纳图像缺乏直观的视觉细节。

为了兼具两者优势,科研人员开始探索“光声融合”方案,将光学与声纳数据联合使用。此前已有少量研究尝试将两类数据融合,用于物体识别或作业环境的重建。但这些方法大多需要复杂的时间同步和离线处理,难以实时运行,而且能实现三维建图的方案并不多,更缺乏针对浑浊环境的高分辨率水下测绘技术。
在 MIT–WHOI 联合项目中,学生 Phung 与导师 Camilli 的目标,是开发一种能够在低能见度条件下实时生成高精度三维地图的光声融合技术。促使他们投入这一方向的原因之一,是如何安全回收未爆水下地雷。
“有些海域残留着旧炸药,船只无法安全靠近,机器人是清除这些炸药的最佳选择。”Camilli 解释道,“但许多炸药位于浪区等能见度极差的环境中,安全操作难度很大。这只是我们技术潜在应用场景中的一个例子。”
在浑浊水中建图
Sonar-MASt3R 建立在法国研究人员提出的 MASt3R 技术基础之上。MASt3R 是一种图像匹配算法,训练目标是接收同一场景的多张视觉图像,并快速估计每个像素的相对深度,从而利用摄像头的二维图像实时生成三维环境模型。
“它的不足在于缺乏绝对尺度。”Phung 介绍说,“算法可以判断‘这个像素比那个像素近五个单位’,但无法告诉你这到底是 5 米还是 5 英尺。”
声纳恰好可以提供这种绝对尺度信息。通过测量声波往返时间,声纳能直接换算出目标物体的具体距离和深度,并给出其形状和轮廓。
在这项新工作中,Phung 和 Camilli 利用声纳数据对 MASt3R 生成的深度估计进行尺度校正,从而获得精确的水下三维地图。即便在浑浊水域中,经过声纳校准的地图也能为机器人提供可靠的目标位置,使其能够安全靠近,并在近距离由光学摄像头完成更细致的观测。
为验证 Sonar-MASt3R,团队在一座装满水、沉积物和多种小物体(如小石块、咖啡杯和包装箱)的水箱中进行实验。水箱内安装了一台机械臂,机械臂末端搭载水下摄像头和声纳传感器。
每次实验时,机械臂先沿预设轨迹从水箱一侧缓慢扫向另一侧,同时采集声纳和视觉数据。首次扫掠结束后,Sonar-MASt3R 会基于声纳数据快速生成一幅粗略地图,勾勒出水箱及其中物体的大致形状和轮廓。随后,系统利用这幅粗略地图,引导机械臂获取目标区域的近距离摄像图像,以逐步提高地图分辨率。
在这一过程中,研究人员采用“关键帧”策略:系统会将每一帧新图像与上一关键帧进行快速比较,如果新图像包含关键帧中没有的额外信息,就将其标记为新的关键帧并加入地图;若内容高度相似,则立即丢弃。借助这种方式,系统可以在实时条件下高效补充地图所需的视觉细节。
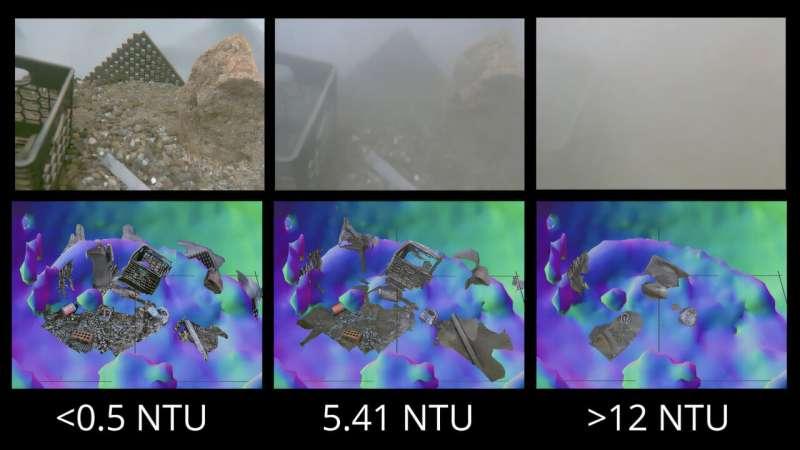
团队通过搅动水箱中的沉积物,设置了八个不同浑浊度等级,对 Sonar-MASt3R 进行测试。与其他光声融合方法相比,该系统生成的三维地图精度更高,能够解析厘米级的小物体细节,即便在更严重的浑浊条件下仍然如此。
在最极端的浑浊状态下,机械臂上的摄像头几乎完全失去可见度,但声纳仍能构建出水箱内隐藏物体的粗略地图。依托这幅初始地图,机械臂可以在“看不见”的情况下安全穿过浑浊区域,靠近指定目标,随后再由水下摄像头进行更精细的观察。
“可以把它想象成:你在一间漆黑的瓷器店里行走,试图在不碰倒任何物品的前提下找到某个特定咖啡杯。”Camilli 打比方说,“这项技术就是帮助你做到这一点的工具。”
接下来,团队计划将 Sonar-MASt3R 带到真实的自然水域中测试。他们认为,实际环境中的测绘任务可能反而比水箱实验更简单。
“水箱更像一个回声室。”Camilli 说,“就好比在鬼屋镜子里操作,到处都是反射、回声和虚假影像,极大增加了处理难度。放到真实海域,情况可能会更好一些。”
研究人员表示,未来 Sonar-MASt3R 有望帮助科学家安全探索那些长期被浑浊和低能见度阻碍的水下区域。
“这项工作的真正价值,在于让我们能够在目前几乎无法完成的任务场景中开展作业。”Phung 总结道,“而之所以这些任务难以实现,很大程度上是因为我们缺乏足够的观测和感知能力。”
本文经 MIT 新闻(web.mit.edu/newsoffice/)授权转载,该网站报道 MIT 的研究、创新与教学相关资讯。









