

软体机器人和智能电子设备的迅速发展,带来了对新型功能材料的迫切需求:这些材料不仅要能够灵活运动、适应复杂环境,还要在完成任务后可以“无痕消失”,避免回收困难和潜在风险。随着相关技术在医疗健康、环境监测、基础设施巡检以及安全防护等领域的深入应用,机器人和设备越来越多地被部署到狭窄管道、密闭空间、地下设施和危险环境等人类难以直接进入的场所。
然而,一旦这类系统被投放到目标环境中,往往很难甚至无法回收。如果长期遗留在现场,可能带来环境污染、对设备或设施的损伤,甚至引发信息泄露等安全问题。现有方案通常需要分别配置驱动单元和降解单元,依赖不同的外部刺激或控制模块来实现运动和销毁,系统结构复杂,在不透明或空间受限的环境中部署和控制都存在明显局限。
可运动又可消失的双模磁性弹性体
针对上述难题,首尔国立大学姜承均教授团队提出了一种双模磁性弹性体材料体系,可通过磁场在“运动模式”和“降解模式”之间切换。相关成果发表在期刊《Advanced Functional Materials》上。
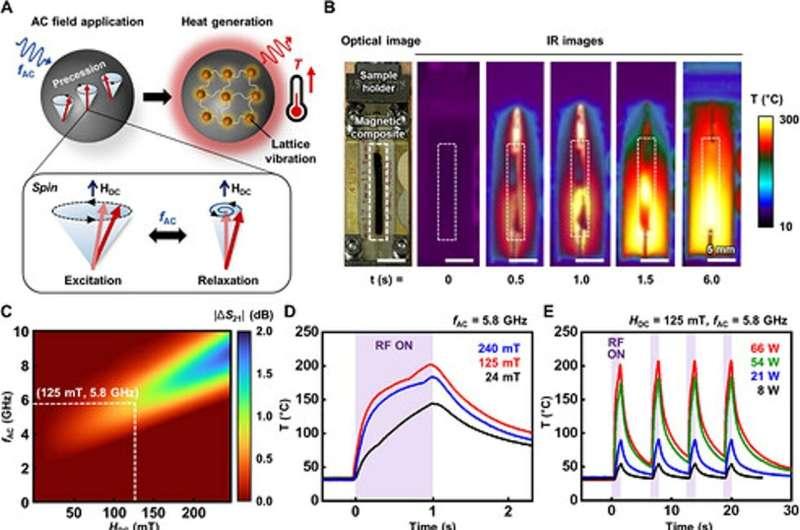
这一材料由硅胶弹性体与Fe₃O₄磁性纳米颗粒复合而成。嵌入的Fe₃O₄纳米颗粒在直流(DC)磁场下充当驱动单元,在千兆赫(GHz)频段的交流(AC)磁场下则作为发热单元。借助这一设计,研究团队在同一材料平台上,通过远程磁场刺激,实现了对软体系统“工作阶段”和“寿命终结阶段”的一体化控制。
在直流磁场作用下,磁性弹性体能够发生可控的形状重构和软驱动,实现行走、弯折等运动以及功能性形变。在GHz范围的交流磁场下,Fe₃O₄纳米颗粒通过铁磁共振效应产生强烈局部热量。实验表明,材料温度可在约1秒内迅速升高超过200 °C,从而触发硅胶弹性体基体的快速热降解,无需额外光源或外部加热装置。
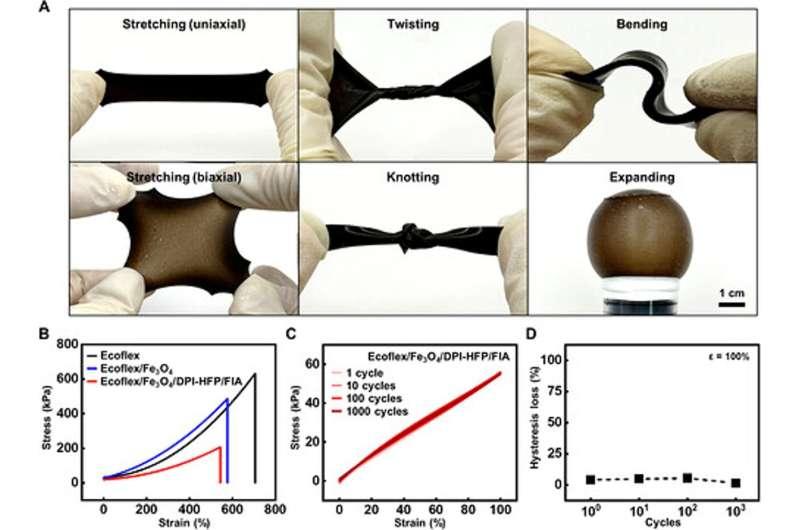
光谱与化学分析结果显示,降解过程主要涉及硅氧键(Si–O键)的断裂。值得注意的是,在具备可快速降解特性的同时,该磁性弹性体仍保持了软体机器人应用所需的力学性能,其断裂伸长率超过460%,表现出较高的延展性和柔韧性。
实验演示与潜在应用场景
研究团队进一步构建了多个原型系统,验证这一材料平台的实际应用潜力。例如,他们展示了一个可通过磁场远程操控的软体机器人:在任务执行阶段,机器人依靠直流磁场驱动实现移动和形变;在需要“销毁证据”或避免回收时,再施加GHz交流磁场,机器人便会迅速升温并完成自我降解。
此外,团队还开发了一个可降解的磁控开关,用于选择性控制LED的通断。该示例表明,这种双模磁性弹性体不仅适用于软体机器人,也可作为安全电子元件的核心材料,在需要任务完成后物理消失的场景中发挥作用。
姜承均教授指出,这项研究展示了一种将驱动与降解功能集成在单一材料系统中的新思路。通过磁场同时调控运动行为和寿命终结过程,这一平台有望推动新一代软体机器人和安全电子设备的发展,尤其适用于难以或不经济回收的应用环境。
总体来看,该工作提出了一种“生命周期感知”的智能材料策略:在同一磁性弹性体平台上,结合远程运动控制、可编程寿命设计以及简化的系统架构。未来,这项技术有望催生多种新型应用,例如:能够穿越并疏通堵塞管道、完成清理后自动消失的软体机器人;在危险或不可达区域执行探测任务、无需回收的临时机器人;以及在任务结束后可主动抹除物理痕迹的安全电子装置等。









