

大阪大学大学院基础工学研究科的研究团队在 2026 年 4 月 30 日宣布,他们利用日本超级计算机“富岳”开展大规模数值模拟,成功揭示了海豚能够高速游泳的关键机制。
海豚通过上下摆动尾鳍,在水中不断产生涡流。研究表明,这种运动会在尾鳍后方形成“与尾鳍尺寸相当的大型涡环”,这些涡环会推动水流向后喷射,从而为海豚提供强大的前进推力。相关成果发表在美国物理学会期刊《Physical Review Fluids》上,并被选为该刊的编辑推荐(Editors’ Suggestion)。
利用“富岳”模拟自游动海豚
海豚游得快,并不仅仅是因为肌肉有力或体型流线,更关键的是身体运动与周围水流之间复杂的相互作用。尤其是在高速游泳时,海豚周围会产生包含大小不一涡结构的湍流,如果只做常规的流场可视化,很难判断究竟哪些流动真正参与了推进、哪些只是“背景噪声”。
研究团队在“富岳”上构建了一个能够让海豚“自主前进”的三维数值模型,即所谓的“自走海豚”模拟。随后,他们基于最新的湍流理论,对计算得到的流场进行分解与分析,将游泳过程中产生的涡流按尺度大小逐级分离并可视化,从而单独观察不同尺度涡结构的作用。
@YouTube
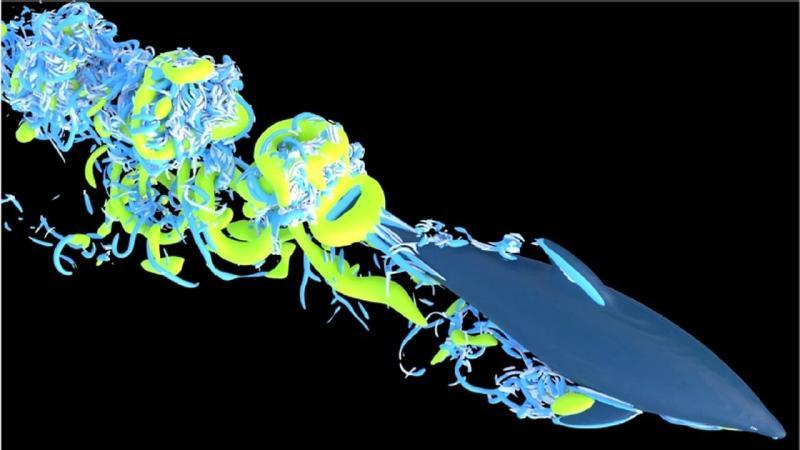
在可视化视频中可以看到:海豚尾鳍后方会形成类似甜甜圈形状的大型涡环,其周围还伴随出现许多更小尺度的涡结构。通过按尺度分离,这些涡被清晰地区分开来,使研究者能够聚焦于真正与推力相关的那一部分流动。
尾鳍尺度的大型涡环是主要推力来源
分析结果显示,对海豚前进贡献最大的是由尾鳍上下摆动产生的、与尾鳍尺寸相当的大型涡环。这些涡环在其中心区域形成强烈的后向水流,也就是高动量的喷流。水被强力向后推挤,海豚则依据反作用力获得向前的推力。
与之相比,游泳过程中虽然也会产生大量小尺度涡,但这些小涡对整体推力的贡献并不显著。此次研究的一个重要意义在于:在复杂湍流中,首次清晰地区分出“真正参与推力生成的涡结构”和“对推力影响较小的涡结构”,从而更准确地理解了生物游动中的流体力学本质。
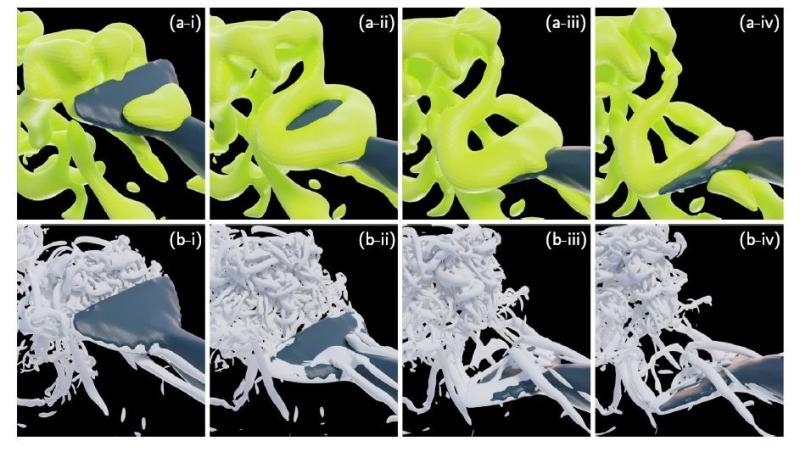
■ 尾鳍下摆时产生的大型涡环
上图上半部分展示了尾鳍下摆过程中,大型涡结构随时间演化的情况。可以看到,沿着尾鳍边缘生成的涡环逐渐从尾鳍表面脱离,并向后方移动,形成稳定而有力的后向喷流结构。
不只看“小涡”,更要看“大涡”
在相关的开放获取论文中,研究团队进一步比较了不同可视化方法的差异。传统的流场可视化往往更容易突出小尺度涡结构,因此画面中会充满细碎的涡,而较大尺度的整体结构反而不易辨认。
通过将流场按尺度分解,他们能够分别提取出大尺度涡、中尺度涡和小尺度涡,从而构建出一个“涡的层级结构”图景。
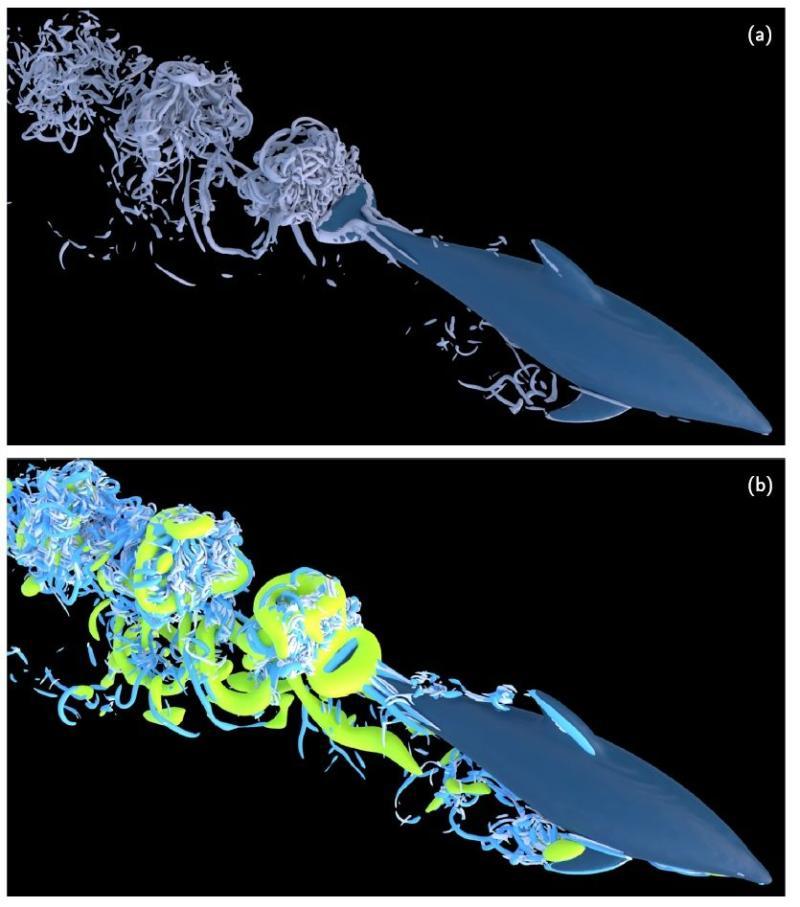
■ 海豚身后涡结构的层级分布
图中上半部分是传统方式得到的可视化结果,可以看到海豚身后布满了细小的涡结构。下半部分则是按尺度分解后的结果:
- 与尾鳍尺寸相当的大型涡用黄色表示;
- 约为其 1/4 尺寸的中等涡用蓝色表示;
- 约为其 1/16 尺寸的小涡用灰色表示。
通过这种方式,大型涡环等与推力密切相关的结构被清晰地凸显出来,有助于从复杂湍流中提取出对推进最关键的流动模式。
面向水下机器人与湍流控制的应用前景
研究团队指出,在湍流中区分“有助于推力的涡”和“对推力贡献较小的涡”的分析方法,有望为新一代水下无人机、水下机器人等推进系统的设计提供思路。通过模仿海豚等生物高效利用大型涡环的方式,有可能实现更节能、更高速的水下推进技术。
此外,这一思路并不限于水中游动,还可以推广到鸟类、昆虫的飞行研究,以及更广泛的湍流控制技术中。借助超级计算机进行高精度数值模拟,再结合先进的湍流分解与可视化方法,科学家能够更深入地理解生物运动与周围流体之间的耦合机制,为仿生工程和流体控制技术提供新的理论基础。









