

声纳与摄像融合系统助水下机器人穿透浑浊水域
MIT 与 WHOI 工程师开发出 Sonar-MASt3R 技术,将声纳与光学成像实时融合,使水下机器人在浑浊、低能见度环境中也能构建高精度三维地图并安全导航。

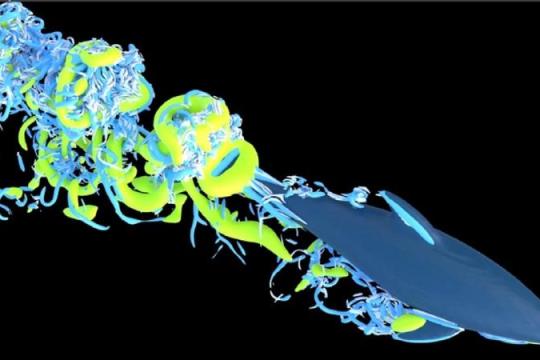
大阪大学利用“富岳”揭示:海豚为何能高速游泳——关键在尾鳍尺度的大型涡环
大阪大学研究团队借助超级计算机“富岳”对自游动海豚进行高精度数值模拟,发现由尾鳍上下摆动产生的、与尾鳍尺寸相当的大型涡环,会在身后形成强烈的后向水流,从而成为海豚高速游泳的主要推力来源。

人机协作潜入水下:提升潜水员与自主水下航行器的合作效率
研究人员正在开发硬件和算法,促进潜水员与自主水下航行器在海事任务中的协同作业。

精彩视频:水下机器人编程实践
林肯实验室实习生艾维·曼克开发并测试了帮助潜水员和机器人水下导航的算法。






