

机器人训练的新挑战:从仿真走向现实
机器人常在虚拟仿真环境中接受特定任务训练,例如切割或材料处理。仿真训练高效、安全且成本较低,但要在现实世界中收集足够的数据却往往代价高昂、进展缓慢,并且在涉及强力接触、切割等物理交互时还存在安全风险。
为应对这一难题,阿斯顿大学的 Alireza Rastegarpanah 博士参与开发了一种全新的 AI 训练方法,有望改变先进机器人系统在现实任务中的训练方式,使其在实际应用中更加实用、稳定和可靠。
瞄准“仿真到现实差距”这一长期难题
这项研究由阿斯顿大学应用人工智能与机器人学助理教授 Rastegarpanah 博士,与伯明翰大学极限机器人实验室的 Jamie Hathaway 共同牵头,核心目标是解决机器人领域长期存在的“仿真到现实差距”问题。
所谓“仿真到现实差距”,指的是机器人在虚拟环境中表现良好,但一旦进入真实世界,性能却明显下降。现实环境中材料特性、接触力、摩擦、以及传感器噪声等因素往往难以完全建模,导致机器人在真实任务中表现不稳定甚至失败。
结合仿真效率与真实环境的AI方法
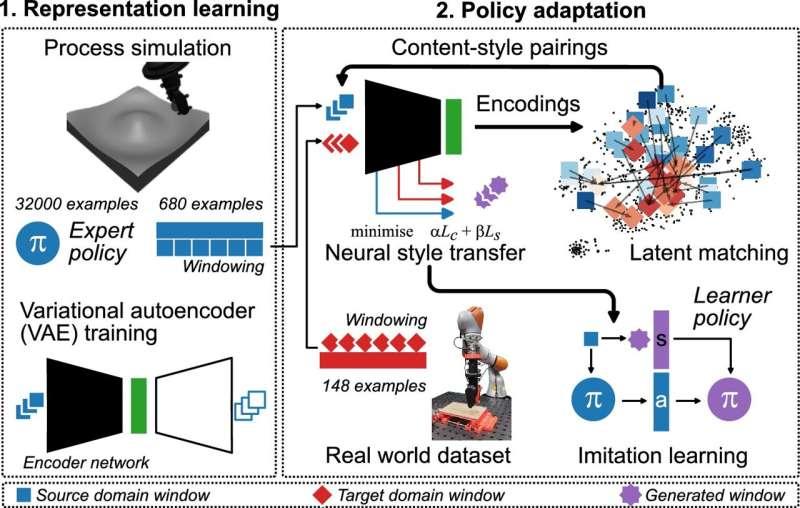
研究成果发表在《Scientific Reports》期刊上。团队提出的方法旨在在不牺牲仿真高效性的前提下,引入足够的现实世界特性,让机器人在面对环境变化时仍能保持可靠表现,而无需依赖大量额外的真实数据。
这项方法的关键在于利用 AI 主动生成多种条件变化场景。通过在仿真中不断“扰动”环境条件,新训练技术让机器人在虚拟阶段就接触到更丰富的变化情形,从而学会在不确定条件下保持稳定表现。
在此基础上,只需少量现实世界数据进行校准,机器人就能更好地将仿真中学到的技能迁移到真实环境中。
从虚拟切割到真实操作:少量现实数据即可适应
借助这一训练框架,机器人可以先在虚拟环境中学习复杂任务,例如切割不同材料、执行精细的材料操作等。随后,通过有限的真实数据对模型进行适度调整,机器人便能在现实世界中执行类似任务,即使面对的是此前未见过或条件不确定的环境。
研究表明,这种方法能够在不依赖大规模现实训练数据的前提下,实现稳定、高效且具备适应性的机器人行为,从而显著缩短开发周期,降低成本,并减少在危险环境中采集数据的风险。
面向高风险与高不确定性的关键应用场景
Rastegarpanah 博士指出,这项技术在机器人必须在不确定甚至危险条件下运行的领域尤为重要。例如:
- 回收与循环经济系统,如电池拆解等需要复杂物理操作的流程;
- 高度灵活的先进制造场景,生产条件和产品类型频繁变化;
- 核设施退役等高危环境,难以进行大量真实试验和数据采集。
在这些场景中,机器人如果能在仿真中完成大部分训练,再通过少量真实数据快速适配,将大幅降低部署难度和安全风险。
迈向“即插即用”的智能机器人系统
Rastegarpanah 博士表示,这项研究证明了:无需依赖海量现实世界训练数据,也可以实现可靠、稳定且具备环境适应能力的机器人行为。这不仅减少了时间和经济成本,也降低了在危险环境中进行试验的风险。
他进一步强调,团队的长期愿景是实现“即插即用”的智能机器人系统:
机器人可以主要在仿真中完成训练,然后快速部署到全新的现实环境中,只需极少的重新配置和额外数据,就能达到可靠的工作性能。
如果这一愿景得以实现,将显著加速可持续制造、资源回收以及自主工业系统等领域的技术创新和落地应用。









