

当前机器人和无人机多依赖三维视觉传感器来感知环境,这类系统虽然功能强大,但在应对现实世界中快速且难以预测的运动时往往力不从心。它们通常无法即时获取物体速度,或者体积庞大、成本高昂,难以在日常设备中广泛部署。
近日,研究人员在《自然》期刊发表论文,介绍了一种集成在单个芯片上的四维成像传感器。该芯片不仅能构建环境的三维地图,还能实时追踪场景中移动物体的速度,从而为机器人提供“距离 + 速度”的四维视觉能力。
芯片级四维成像传感器
研究团队设计并制造了一块焦平面阵列(FPA)芯片,在一片硅片上蚀刻出由 61,952 个固定像素组成的物理网格。每一个像素都是一个微型传感单元,能够向场景发射激光并接收返回信号。
为了“看见”周围环境,外部光源发出的激光被耦合进芯片内部,通过一组光学开关网络在芯片上依次分配和传输,再定向到不同像素组。每个像素利用调频连续波(FMCW)激光雷达技术对返回信号进行测量,随后通过信号处理计算出目标的距离和速度。
与许多传统激光雷达系统中“发射像素”和“接收像素”分离的设计不同,这款芯片上的所有像素既负责发射也负责接收,从而显著压缩了系统体积,使整体结构更加紧凑。
连续激光带来的双重测量能力
这款芯片采用的是连续激光束,而非传统传感器常用的短脉冲光源。连续光的优势在于可以更精细地检测光波频率的微小变化。通过分析这些频率偏移,芯片能够在一次测量中同时推算出物体的距离和相对速度,实现真正意义上的四维成像。
同时获取距离与速度的实验验证
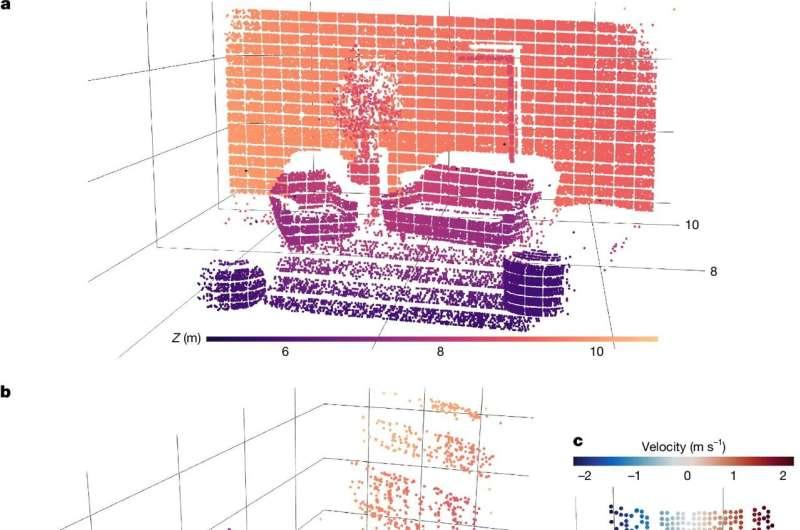
研究团队在多种场景下对芯片进行了测试,以评估其在不同距离和运动条件下的表现。芯片通过扫描场景,将采集到的数据重建为由数千个点组成的三维数字地图。
在室内实验中,系统成功绘制出距离 6 至 11 米范围内房间的三维结构。为了进一步验证测距能力,研究人员将芯片对准 65 米外的一栋建筑物,传感器依然能够分辨出窗户、阳台等细节特征。
在动态测试中,团队将目标安装在旋转盘上,通过芯片传感器实时测量其运动速度,验证了系统对运动目标速度的即时追踪能力。
通讯作者 Remus Nicolaescu 表示:“这是首次在单个芯片上展示大规模相干焦平面阵列及其所有相关电子元件的集成,并达到了适用于大规模应用的成本结构。”
未来应用与改进方向
目前,这款芯片仍有进一步优化空间,例如提升空间分辨率、扩展有效测距范围等。一旦走出实验室,这项技术有望为机器人和无人机带来更快速、更精确的环境感知能力,同时也可能被集成到包括手机在内的各类数码相机中,显著增强其深度感知和运动捕捉性能。
© 2026 Science X Network









