

Ouster发布原生彩色激光雷达Rev8系列 拟以单一传感器兼顾成像与测距
Ouster在新一代Rev8平台上推出具备“原生彩色激光雷达”能力的产品线,试图以单一传感器同时提供摄像头级图像与三维深度信息。


研究称斯堪的纳维亚最大史前土冢或为滑坡灾害纪念结构,而非王者陵墓
发表于《欧洲考古学杂志》的新研究基于激光雷达与木材年代学证据提出,挪威拉克内豪根土冢可能与一场古代滑坡及公元6世纪中期的气候动荡有关,其功能或更接近仪式性纪念结构而非精英墓葬。
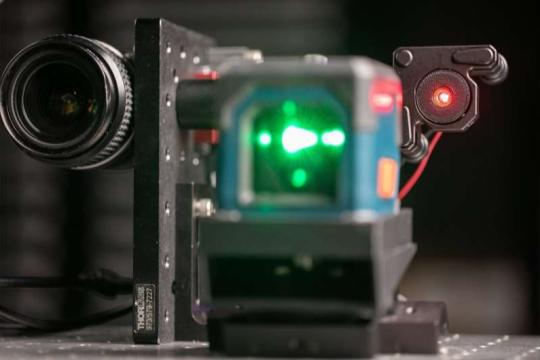
Scheimpflug相机有望将类激光雷达测距从6米拓展至4公里
佐治亚理工研究所团队利用百年前的Scheimpflug光学原理,开发出可在数公里范围内进行高分辨率测距和大气监测的新型相机技术,有望在部分场景中补充甚至替代传统飞行时间式激光雷达。
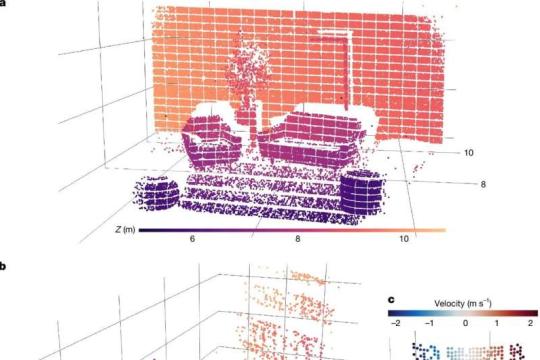
新型芯片实现四维视觉:机器人可同步追踪距离与速度
研究团队在单芯片上集成大规模相干焦平面阵列,实现同时获取三维空间信息与物体速度的四维成像,为机器人和无人机提供更快速精确的环境感知能力。
Ouster以现金加股份收购StereoLabs 传感器供应商整合加速
激光雷达制造商Ouster宣布以3500万美元现金及180万股股份收购视觉感知系统公司StereoLabs,此举被视为感知传感器行业整合进程中的最新一笔交易。

航空激光雷达助力考古测绘:效率提升背后引发原住民同意与权益争议
航空激光雷达正被广泛用于穿透森林树冠绘制地表遗址,但在原住民土地与祖先遗骸相关研究中,远程扫描可能绕开地方同意,引发“监视式取用”与知识挪用担忧。洪都拉斯拉莫斯基蒂亚“白城”事件与墨西哥恰帕斯州Metzabok的合作实践,凸显技术应用中的伦理分歧与协作路径。
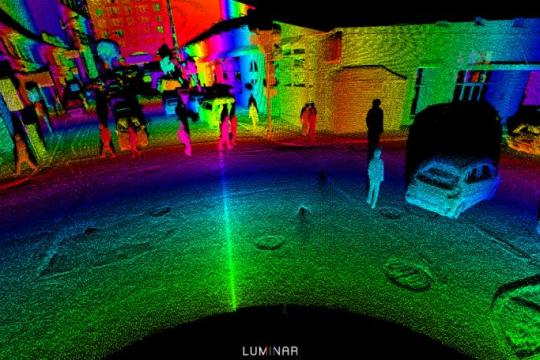
Luminar破产资产出售获批 现身“内部买家”高价竞标未被采纳
美国破产法院批准将Luminar激光雷达业务出售给MicroVision及将半导体部门出售给Quantum Computing Inc.。在听证会前夕,一名被称为“内部买家”的神秘竞标者提出远高于拍卖最高价的新报价,但因存在“缺陷”未被采纳。

人工智能方法TreeStructor实现基于遥感点云的三维森林树木分离与重建
普渡大学与德国基尔大学等机构研究团队提出TreeStructor,通过构建“树木字典”在复杂森林点云中识别重复结构,实现树木分离与三维重建,并在多类激光雷达数据上验证其鲁棒性。
仿生激光雷达原型实现“超越视网膜分辨率”,集成光子架构支持自适应四维感知
研究人员近日披露的一种仿生激光雷达原型在空间细节分辨率上实现了其所称的“超越视网膜分辨率”,并在体积与系统集成度上瞄准现实机器部署需求。与通过堆叠更多激光器与探测器来提升性能的传统路径不同,该方案借鉴生物视觉的资源分配机制,将更高的采样密度集中到关键区域,并可随场景变化实时调整,从而把机器视觉从静态成像扩展为随时间演化的动态感知问题。 借鉴中央凹机制:将分辨率集中到“感兴趣区域” 人眼的高分辨率视
Luminar为激光雷达业务引入2200万美元领头竞标者
破产重组中的Luminar已为其激光雷达业务确定2200万美元的领头竞标方Quantum Computing Inc.,相关资产处置及此前宣布的半导体子公司出售交易均有待破产法院批准。

禾赛拟将2026年激光雷达年产能提升至400万台
中国激光雷达制造商禾赛在CES上表示,计划到2026年把激光雷达传感器年产量从200万台提高到400万台,意在在全球市场中扩大份额。该计划公布之际,美国同行Luminar正处于破产重组阶段。






