

随着机器人从封闭的工厂环境走向办公室、医院、仓库以及各类公共空间,如何让周围的人及时理解机器人下一步要做什么,正成为一个越来越关键的问题。
博林格林州立大学(BGSU)与纽约大学坦顿工程学院的研究团队在一项新研究中指出,增强现实(AR)技术可能是一个出人意料的有效工具。通过智能手机,将机器人的目标位置、规划路径以及安全区域直接叠加在现实画面上,实验结果显示,人们在预测机器人行为和识别潜在风险方面的表现有明显提升。
这项研究发表在期刊《Empathic Computing》上,聚焦于人机交互中愈发突出的“透明度”问题。尽管机器人自主能力不断增强,但其内部决策过程对人类观察者来说往往仍是“黑箱”。这种不透明会带来困惑、削弱信任,甚至在某些场景下引发安全隐患。
纽约大学坦顿机械与航空航天工程教授、论文合著者 Vikram Kapila 表示:“在人机协作中,一个核心难题是让人们在机器人行动之前就理解它的意图。当用户能看到机器人计划的行进路径、目标位置和安全边界时,他们就更容易预测机器人的动作,并据此调整自己的移动决策。”
AR 系统如何工作
为应对这一挑战,研究团队开发了一款基于智能手机的 AR 应用,用于实时展示移动机器人的意图。系统使用搭载谷歌 ARCore 软件的标准安卓手机,将数字信息叠加到用户看到的真实环境画面中。
应用提供三种不同的视觉呈现模式:
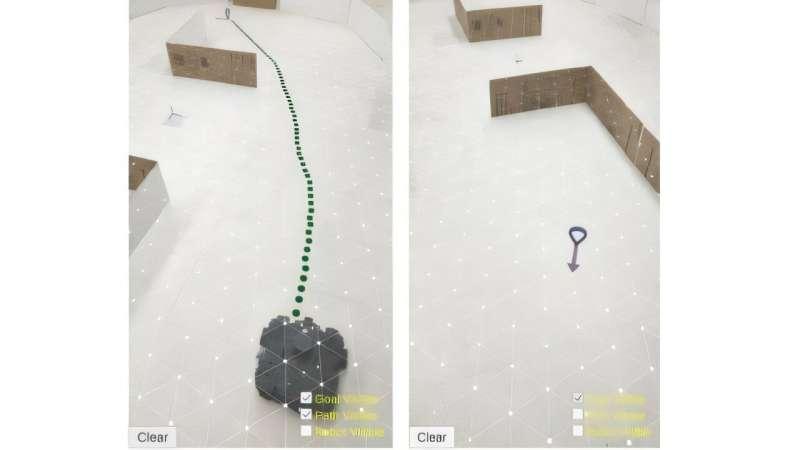
- 目的地模式:以虚拟图钉的形式标出机器人的目标位置;
- 路径模式:显示机器人计划行进的路线;
- 数字孪生模式:在场景中呈现机器人的虚拟“分身”,并附带一个视觉缓冲区,用于标示可能发生碰撞或干扰的区域。
与许多依赖专用头显或投影设备的 AR 系统不同,这一方案只需要普通智能手机即可运行。这种低门槛的设计,有望加速其在工厂车间、仓储物流等人机共处空间中的部署和应用。
测试情境感知与信心
为了验证该系统是否真正提升了人类对机器人行为的理解,研究人员招募了 58 名参与者,他们在机器人和 AR 使用经验方面各不相同。参与者观看了一系列包含机器人导航任务的 AR 场景,然后回答问题,以评估他们的情境感知能力——即对环境中正在发生和即将发生事件的感知、理解与预测能力。
评估采用广泛使用的情境感知全球评估技术(SAGAT)框架,从三个层面进行测量:对关键信息的感知、对其含义的理解以及对未来事件的预测。
在实验中,参与者需要完成多项任务,包括识别机器人的目标、辨认环境中的障碍物、判断哪些物体会干扰机器人运动,以及预测哪些区域对人类来说仍然安全。
结果显示,参与者在所有任务中的平均情境感知得分达到 86.5%。他们在识别障碍物以及判断避免干扰机器人操作的安全区域方面表现尤为突出。
更为关键的是,参与者普遍表示与机器人共处时的信心有所提升。超过 96% 的参与者认为,AR 界面增强了他们对机器人意图的理解,并提高了自己预测机器人行为的把握度。

Kapila 指出:“研究结果显示,即便是基于智能手机的轻量级 AR 系统,也能显著提升人们对机器人目标和动作的感知。”论文第一作者、博林格林州立大学助理教授 Sonia Chacko(其博士学位在纽约大学坦顿获得)补充说:“这种理解能力的提升,是建立信任、保障安全以及实现高效人机协作的重要基础。”
超越实验室的应用前景
这项研究的意义,恰逢机器人在传统人类工作场景中快速普及的时间点。如今,仓库越来越依赖自主移动机器人搬运货物;医院正在试用机器人配送系统;服务机器人也开始出现在机场、酒店和零售门店。在这些环境中,人类快速理解机器人即将采取的行动,重要性不亚于机器人理解人类行为。
在相关工作中,Kapila 还开发了一套混合现实系统,让用户通过平板电脑向机器人传达“力”的指令。用户无需编写复杂控制程序,而是在平板屏幕上将虚拟箭头放置在现实物体上:箭头的位置表示施力点,方向表示施力方向,长度则代表施力大小。机器人随后执行相应任务,并通过移动的虚拟指示器反馈当前施力情况,帮助用户判断是否达到预期效果。
混合现实推动直观的人机协作
这一混合现实研究成果发表在期刊《Machines》上,由 Christian Lourido、Kishan Reddy Raghunath 和 Kapila 共同署名。研究表明,混合现实技术可以让人机协作变得更加直观,使人类能够以视觉方式表达复杂的物理意图,而不必依赖专业编程或昂贵的触觉交互设备。
未来,这类技术有望在制造业、医疗保健以及其他需要高精度、安全协作的人机共作场景中发挥作用。
总体来看,让机器人的意图“可视化”,正在帮助弥合人机协作中长期存在的一道鸿沟。随着自主系统在日常生活中愈加常见,通过数字化界面展示机器人的计划与行为,将有助于让人们在与机器人并肩工作时感到更加安心和自在。









