
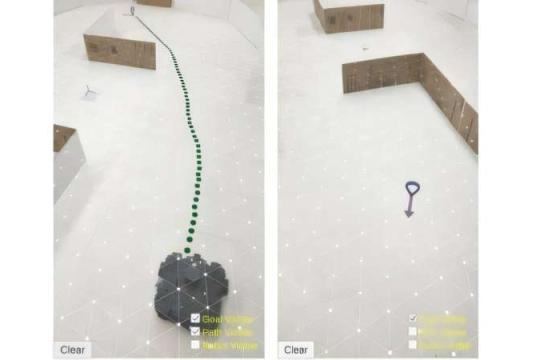
用增强现实读懂机器人:让人类更容易预测机器行为
研究人员利用智能手机上的增强现实技术,将机器人的目标、路径和安全区域叠加到现实场景中,显著提升了人类对机器人行为的理解和预测能力。


机器人 Pepper 能否成为理想的游戏伙伴?
挪威科技大学团队通过一项“垃圾桶篮球”实验,研究类人社交机器人 Pepper 在不同游戏模式和出手顺序下,能否被人类视为有趣、合理的玩伴。

新系统让AI代理读懂并回应人类面部表情
塔林大学一项博士研究提出“能动面部表情管线”系统,让类人AI代理不仅能识别人类表情,还能实时生成相应面部反应,从而在互动媒体等低风险场景中实现更自然的非语言交流。

朋友还是敌人?人类与人工智能在社会意图感知上的差异
研究团队通过“具身社会意图”新基准,比较人类与AI在从肢体动作中判断友好或敌对意图上的差异,揭示了关键的感知对齐鸿沟。

迪斯科激光为雪地压雪机投射轨迹与安全提示
国际团队在THEIA-XR项目中利用扩展现实与激光投射技术,为雪地压雪机等重型机械提供轨迹、警示和速度信息显示,在恶劣环境下提升操作效率与人员安全。

研究证实:先进大模型在经典图灵测试中“比真人更像人”
加州大学圣地亚哥分校团队首次用图灵1950年提出的原始方法系统测试现代大模型,发现在特定提示下,GPT-4.5等模型在图灵测试中被误判为人类的比例已与甚至超过真人。

音频提示让纯语音 AI 更具“在场感”,但也被部分用户视为失礼
卡内基梅隆大学团队通过空间化与拟音音效,为纯音频 AI 打造“同处一室”的存在感,显著提升用户参与度的同时,也意外触发了人们对其遵守人类社交规范的期待。
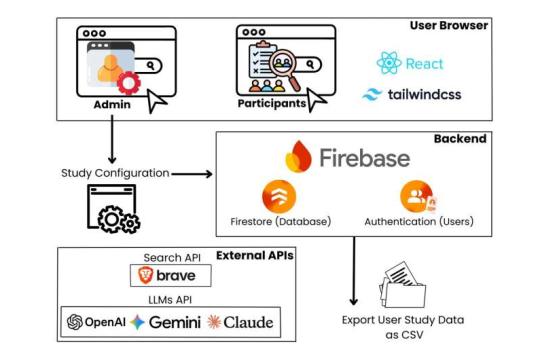
免费开源平台 ECHO 助力研究聊天机器人对信任、学习与决策的影响
俄克拉荷马大学团队推出开源低代码平台 ECHO,帮助研究者更便捷地开展围绕对话式人工智能、人机交互与信息检索的行为实验,加速理解聊天机器人如何影响人类的信任、学习和决策过程。

Meta 推出 Ray-Ban Display 新功能:用手指“空中写字”就能输入文字
Meta 宣布为搭载显示屏的智能眼镜 Meta Ray-Ban Display 推出多项更新,包括面向全体用户开放的“神经手写输入”、显示内容录屏、步行导航扩展以及开发者预览计划等。

别把最真挚的话交给人工智能来说
当AI开始代写退休致辞、婚礼誓言和悼词,我们在最亲密的人类表达中,究竟失去了什么?
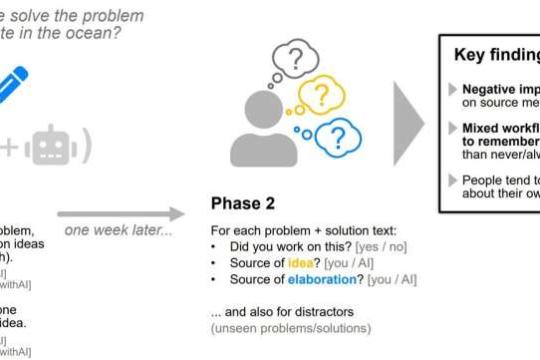
研究:一周后人们难以记住内容是否由人工智能生成
欧盟即将实施AI内容标注规定,但最新研究显示,人们在短短一周后就难以准确回忆内容是否由人工智能生成,这对监管、教育和AI系统设计提出了新挑战。

体载交互技术带来的新型隐私与安全隐患
可穿戴与体载交互技术正逐步取代传统智能手机和电脑,但它们贴身、持续在线的特性,也让用户暴露在前所未有的隐私与安全风险之下。CISPA 研究员 Daniel Gerhardt 通过专家访谈与文献分析,系统梳理了这些风险,并提出一套面向未来设计的安全与隐私指南。






