
有一种简单却极具吸引力的小玩具,就是拍打手环——轻轻一拍,它就能在直线和卷曲两种形态之间切换。许多人并不知道,这种令人上瘾的“啪嗒”变化,其实源自双稳态结构的原理。双稳态结构可以在两个稳定状态之间切换(一个可视为0,另一个视为1),从而以机械比特(m-bit)的形式,将信息直接存储在材料的物理形态中。
多年来,研究人员一直在探索如何设计具有可编程结构的特殊材料,即所谓“可编程超材料”,以便更高效地控制机器人和其他机械系统。然而,真正难题在于如何对这些系统进行实际编程:传统上,每一个机械比特都需要单独操控,过程既繁琐又耗时。
现在,洛桑联邦理工学院(EPFL)工程学院柔性结构实验室(fleXLab)、荷兰AMOLF研究所和莱顿大学的研究人员提出了一种出乎意料简单的全局编程方法:通过旋转来“写入”材料记忆。研究团队通过调节旋转平台的速度、方向和加速度,利用旋转系统中产生的离心力和欧拉力,使弹性梁在两个稳定状态之间来回翻转,从而实现一次性“写入”多个机械比特的新方案。
相关成果发表在《科学进展》(Science Advances)期刊上。
fleXLab负责人 Pedro Reis 表示:“我们称这种方法为‘动态驱动’。它的妙处在于,只需通过旋转,就能全局设定机械超材料系统的记忆。记忆存储是机械计算和软体机器人应用的关键环节,这类应用有望在未来将物理智能直接嵌入构成材料之中。”
一次旋转“拼出”字母
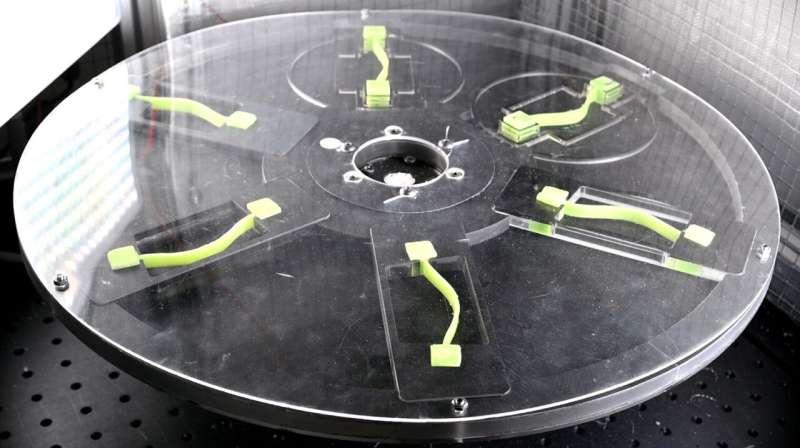
为展示动态驱动的能力,研究人员利用安装在旋转平台上的五根手指粗细的硅胶梁,“写出”了26个大写英文字母。首先,他们采用 ASCII 字符编码标准,为每个字母分配一个由0和1组成的5位二进制数。随后,他们调整每根弹性梁与平台的连接方式,使其在不同的旋转参数阈值下,会翻转到两个稳定位置之一(向左或向右)。
平台由一台高扭矩电机驱动,以精确控制旋转过程。根据旋转时是否达到各自的“翻转阈值”,每根梁要么保持原始方向,要么发生翻转。最终,通过读取五根梁的朝向组合,并与对应的二进制编码匹配,研究人员就能解码出被“写入”的字母。
共同第一作者 Eduardo Gutierrez-Prieto 指出:“像我们使用的这种高扭矩半导体电机,直到最近才具备足够的功率和精度,能够以这种动态方式为机械超材料‘写入’信息。”
走向智能远程操控系统
研究团队正将这一动态驱动方法向实际应用方向推进。Reis 强调,旋转平台只是利用旋转诱导力来控制机械超材料的一个示范场景。在生物医学领域,可以借助离心力驱动微小的双稳态阀门,在离心微流控通道中实现开关控制,从而以高通量、可控的方式引导诊断设备中的液体流动。
类似地,无需电子元件的软体机器人也可以集成对气压或水压变化敏感的双稳态关节,通过气动或液压管线进行驱动,在没有车载电路的情况下完成复杂运动。
AMOLF 研究员 Martin van Hecke 总结道:“我们的动态控制范式,为智能远程操作设备提供了一条多功能路径。这类设备能够在从微流控与植入式装置,到智能基础设施,以及水下或医疗机器人等各类物理系统中高效运行。”










