

机器人组装的建筑模块有望比部分现有建筑技术更环保。麻省理工学院(MIT)研究人员在期刊《Automation in Construction》发表的一项新研究表明,这种方法在碳排放、成本和施工时间等方面都展现出潜在优势。
研究团队开展了一项可行性研究,评估利用“体素”(即可模块化拼装的三维子单元)搭建简单建筑的效率。这类体素可以组合成复杂且具有高耐久性的结构。
在分析多种现有体素的性能后,研究人员提出了三种新的体素设计,目标是简化施工流程。他们还开发了一套机器人组装系统以及一个用户友好的软件界面,用于生成基于体素的建筑布局,并向机器人下达装配指令。
结果显示,与3D混凝土打印、预制混凝土模块和钢结构等常见技术相比,这种基于体素的机器人组装系统可将建筑材料在整个生命周期内的碳排放总量最多减少82%。
在成本和施工时间方面,该系统同样具备竞争力。不过,研究也指出,用于制造体素的材料类型会显著影响其碳足迹和整体成本。
研究人员强调,在可扩展性、耐久性、长期稳定性以及防火性能等关键问题上仍需进一步探索,但这些初步结果已经凸显了该方法在自动化现场施工中的潜力。
MIT比特与原子中心(CBA)研究生、论文第一作者Miana Smith表示:“让我特别兴奋的是,机器人组装离散格栅为数字制造在建筑环境中的实际落地提供了一条路径,使我们能够更高效、更可持续地建造。”
论文作者还包括瑞士洛桑联邦理工学院研究生、曾在MIT访问的Paul Richard;CBA研究生Alfonso Parra Rubio;以及资深作者、MIT教授兼CBA主任Neil Gershenfeld。
设计更适合建筑的体素模块
近年来,MIT比特与原子中心的研究人员一直在开发体素——一种格栅式建筑模块,可组装成高强度、高刚度的结构,如飞机机翼、风力涡轮叶片和空间结构等。
“在这项工作中,我们将航空航天领域的原理应用到建筑上。为什么不能像造飞机那样高效地造房子?”Gershenfeld说。他的实验室此前曾与NASA、空客和波音合作开展体素组装相关研究。
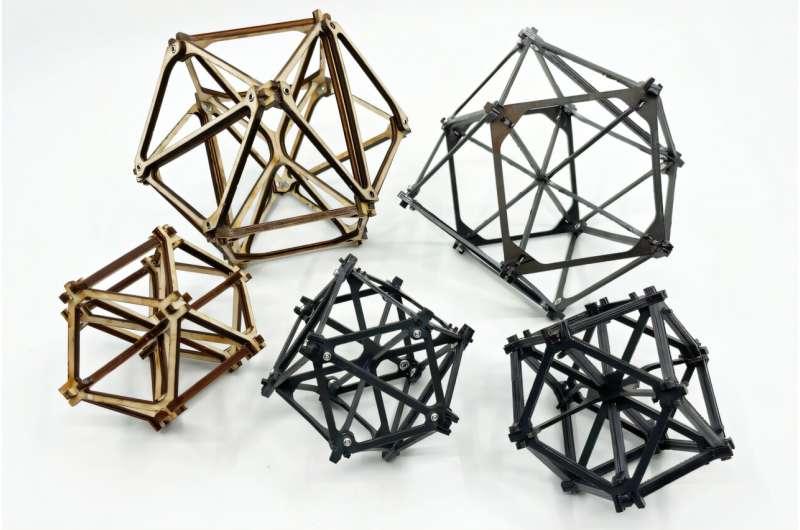
为评估基于体素的建筑组装策略是否可行,研究团队首先对八种现有体素设计的机械性能和可持续性进行了测试,这些设计包括由玻璃纤维尼龙制成的立方八面体,以及由钢制成的凯尔文格栅等。
在此基础上,他们提出了三种新体素设计,采用新的几何结构,使其更易于由机器人组装成更大规模的建筑。新设计基于高强度、高刚度的八面体格栅,体素之间可机械自对准,形成整体刚性结构。
Smith解释道:“这些体素具有互锁特性,因此在不依赖大量连接件的情况下就能获得良好的机械性能,从而加快施工过程。”
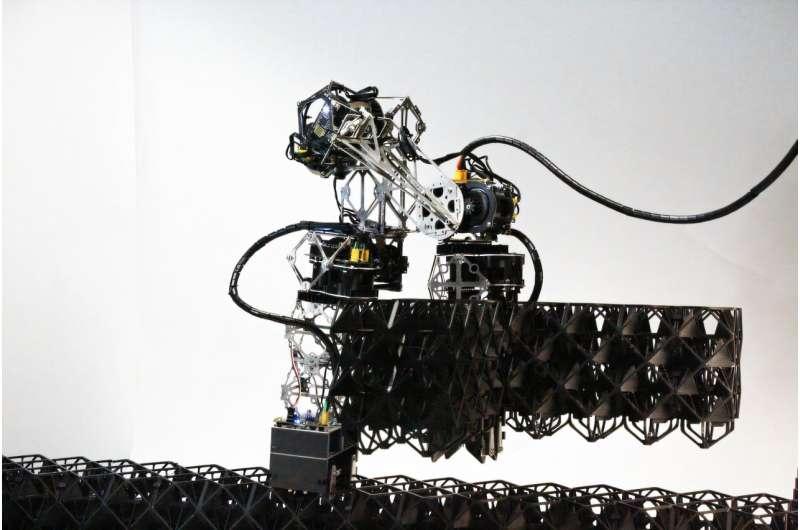
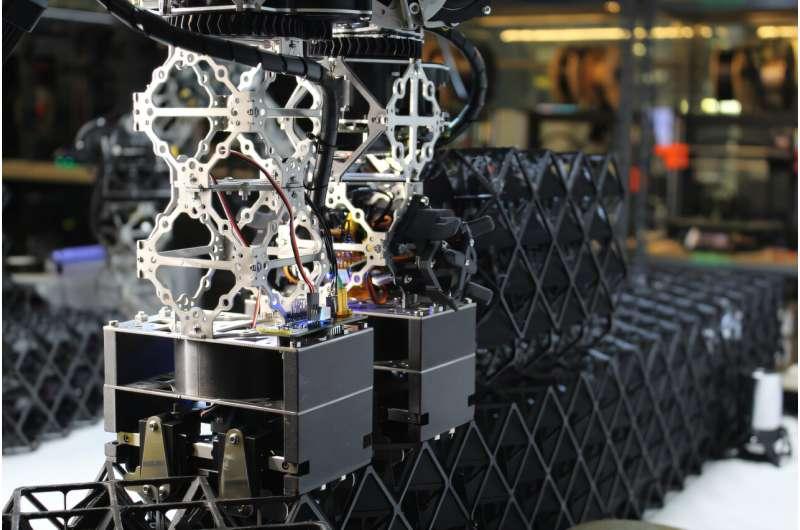
为了进一步提升施工效率,团队设计了一种受“蚯蚓式机器人”启发的组装系统。这些机器人通过交替锚定和伸展身体,在体素结构表面移动。
这种模块化蚯蚓格栅组装机器人(MILAbots)在两端配备夹持器,用于抓取和放置体素模块,并完成卡扣式连接。
“机器人可以将体素放到位后再‘踩’一下,让各部分互锁。我们可以利用机器人与体素之间的机械关系,实现精确的装配操作。”Smith说。
研究团队还评估了用塑料、胶合板和钢三种材料制造新体素设计时的隐含碳排放,并基于机器人组装系统,估算了建造一座简单单层建筑的产能和成本,再与其他建筑方法进行对比。
显示出可观的环境收益
研究结果表明,多数现有体素,尤其是塑料体素,在可持续性方面表现不佳;但新设计的钢制和木制体素则展现出显著的环境优势。
例如,使用钢制体素时,其隐含碳排放仅为3D混凝土打印的36%,为预制混凝土的52%。胶合板体素的碳足迹更低,仅约为3D混凝土打印17%和预制混凝土24%的隐含碳。
Smith补充说:“塑料体素方案并非完全不可行,只是需要在塑料种类、填充方式和几何设计上做出更有针对性的选择。”

在施工效率方面,采用钢制和木制体素方案的预计现场组装时间平均为99小时,而对比的现有建筑方法平均为155小时。
这种速度优势主要来自体素组装的分布式特性。单个MILAbot的作业速度低于现有自动化技术,但当20台机器人并行工作时,整体系统的施工效率可以追平甚至超过现有自动化方法,同时成本更低。
Gershenfeld指出:“这种方法的一个优点是具有渐进性。你可以先建一部分,如果以后需要新房间,只需在原有结构上继续扩展即可。它也是可逆的,如果建筑用途改变,可以拆解体素并重新配置结构。”
研究人员还开发了一个界面,用户可以在其中输入或手动设计体素化结构。系统会自动规划MILAbots的施工路径,并向机器人发送具体装配指令。
下一步,团队计划在不丹搭建更大规模的测试平台。Gershenfeld表示,他们将利用比特与原子中心协助建立的“超级制造实验室”复制这些机器人,并在规划中的可持续城市项目中测试其施工能力。
未来的研究方向还包括:评估体素结构在横向载荷下的稳定性,改进设计工具以更好地反映系统的物理特性,提升MILAbots的性能,以及研究集成覆层、保温层或电气与管道布线的体素模块。
“我们的研究为一种分布式机器人组装模式提供了支持,这可能是将数字制造真正引入建筑施工的实用途径。”Smith总结道。
本文经MIT新闻(web.mit.edu/newsoffice/)授权转载,该网站报道MIT的研究、创新与教学相关资讯。









