
集成感知与驱动的智能人工肌肉,为类人机器人带来新突破
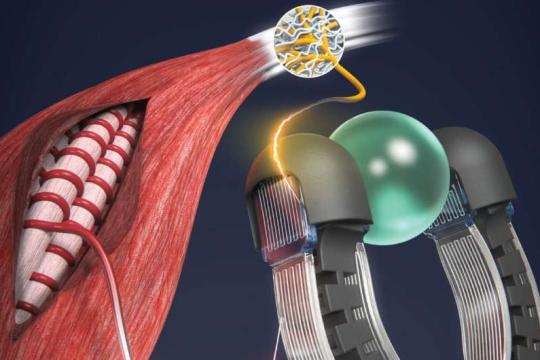
研究团队仿生肌肉-肌腱复合体结构,在液晶弹性体中嵌入液态金属通道,开发出可同时驱动与感知的“智能人工肌肉”,有望应用于下一代类人机器人与软体机器人。


电流体纤维人工肌肉:为静音机器人与可穿戴系统铺路
研究团队将电流体动力学微型泵与薄型 McKibben 人工肌肉整合为纤维状执行器,在无需外部泵和电机的前提下,实现安静、柔顺且可分布式布置的“人工肌肉”,为新一代机器人和外骨骼提供了全新设计思路。

气动仿生人工肌肉:让机器人举起自重百倍并适应极端环境
亚利桑那州立大学团队开发出新型气动仿生人工肌肉,可在高温、粗糙环境下稳定工作,并让软体机器人举起自身重量的100倍,同时无需外接电源。
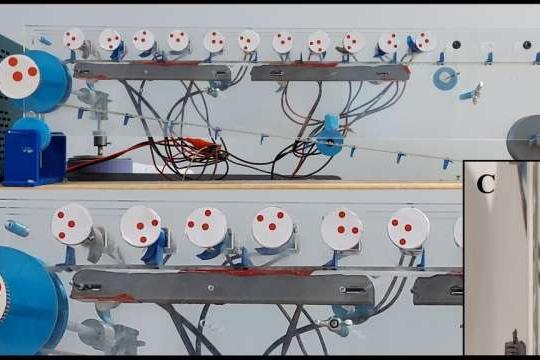
机械电机网络再现人类肌肉在负载增加时的响应行为
布里斯托大学团队搭建了一个由简单电机组成的机械网络,在不模拟复杂生化细节的前提下,成功复现了人类肌肉在负载增加时自动招募更多“电机”的关键特性,为自适应人工肌肉和软体机器人设计提供了新思路。






