

高效“人工肌肉”更进一步
肌肉是极高效的受控力输出系统,其强度、响应速度、可扩展性和精细控制能力长期以来难以被工程装置复制。机器人和假肢工程师一直在尝试制造能接近生物肌肉性能的驱动器,如今,来自麻省理工学院媒体实验室和意大利巴里理工大学的研究人员在这一方向上又向前迈出了一步,开发出性能更接近生物肌肉的人工肌肉纤维。
这些新型纤维像生物肌肉中的肌纤维束一样,可以根据不同任务需求进行多种方式的组合和排列。与传统刚性机器人驱动系统不同,它们柔顺可弯曲,能够舒适贴合人体,并且在工作时无需电机、外部泵或其他笨重部件即可实现几乎静音的运行。
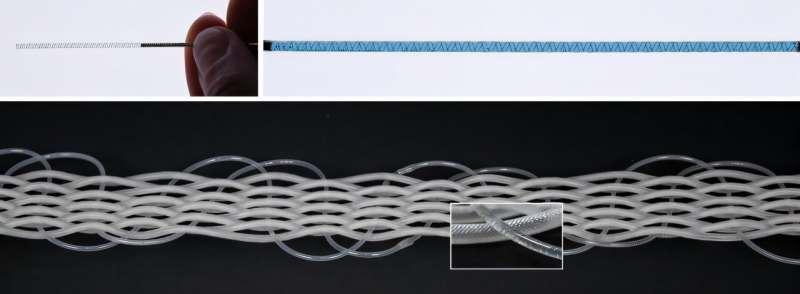
电流体纤维肌肉的基本构型
这项新技术被称为“电流体纤维肌肉”,本质上是一种以纤维形式构建的电驱动执行器。相关成果已发表于《科学机器人学》。研究由媒体实验室博士生 Ozgun Kilic Afsar、巴里理工大学教授 Vito Cacucciolo 及其合作者共同完成。
Afsar 介绍,这一系统融合了两类关键技术:
- 薄型 McKibben 执行器:一种以流体驱动的人工肌肉结构;
- 基于电流体动力学(EHD)的微型固态泵:在密封流体腔体内产生压力,无需机械运动部件或外部流体供应。
破解流体驱动“笨重外设”的难题
迄今为止,大多数流体驱动软执行器都依赖外部液压系统,这些系统通常体积大、重量高且噪声明显,使其难以集成到需要高机动性或紧凑轻量化设计的设备中。这一问题一直是流体执行器走向实际应用的核心瓶颈。

研究团队的突破点在于采用了基于电流体动力学原理的集成微型泵。这些毫米级电驱动泵通过向介电流体注入电荷,产生离子并驱动流体流动,从而在系统内建立压力和流量。每个泵仅重几克,厚度不超过一根牙签,并且可以连续制造,便于规模化生产。
Afsar 表示:“我们将这些纤维泵集成进由薄型 McKibben 执行器构成的闭合流体回路中。”不过,由于两种组件的动力学特性差异较大,实现稳定耦合并不简单。
借鉴生物肌肉的拮抗结构
团队采用的关键设计之一,是将纤维成对布置成“拮抗配置”。Cacucciolo 解释,这种配置类似于人体肌肉:当一块肌肉收缩时,另一块则被动伸长,例如弯曲手臂时肱二头肌收缩、肱三头肌伸展。
在他们的系统中,一个毫米级纤维泵被安置在两个同尺寸 McKibben 执行器之间。泵将流体压入其中一个执行器,使其收缩,同时从另一个执行器抽出流体,使其放松。
Afsar 指出:“这与生物肌肉的组织方式非常相似。我们采用这种配置不仅是为了仿生,更是因为需要在肌肉结构内部实现流体储存。”

传统上,EHD 泵往往需要与外部、开放于大气的储液罐连接,这严重限制了其在移动机器人系统中的应用。通过将两个 McKibben 纤维串联,并在中间嵌入纤维泵形成闭合回路,团队完全消除了对外部储液罐的依赖。
预加压:避免气穴与性能退化
研究还发现,肌肉纤维并非只需简单注满流体,而是必须在一定的预加压状态下工作。
Afsar 解释:“系统内部存在一个最低可接受压力阈值,如果内部压力低于这一阈值,泵可能会退化或暂时停止工作。”
这与气穴现象有关:当泵入口压力低于液体的蒸气压时,会产生蒸气泡,最终导致介电击穿,破坏泵的正常工作。
为避免气穴,团队在系统初始就施加了一个“偏置压力”,确保纤维泵入口处的压力始终高于液体蒸气压。偏置压力的大小可以根据具体应用进行调节。
她补充说:“为了获得最大的肌肉收缩量,我们发现存在一个最佳的偏置压力区间。如果希望系统响应更快,可以提高偏置压力,但最大收缩幅度会有所降低。”
重新思考机器人结构设计
Cacucciolo 指出,目前大多数机器人手臂和机械手仍然围绕电动伺服电机构建,其结构与自然肌肉系统有本质差异。伺服电机输出的是旋转运动,需要通过机构转换为线性运动;而生物肌肉天生以线性方式收缩和伸展,这些电流体纤维同样如此。
他表示:“现有的机器人手臂和类人机器人通常是围绕伺服电机来设计的,这会带来集成上的限制。伺服电机难以高密度封装,而且质量往往集中在关节附近。”
相比之下,纤维状人工肌肉可以像肌腱和肌肉一样,紧密嵌入机器人或外骨骼的内部结构中,并沿着结构分布,而不是集中在少数关节位置。这为机器人形态和结构布局提供了更大的自由度。
可穿戴设备与更广泛应用
这些电流体肌肉在可穿戴设备领域具有明显潜力,例如帮助人类提举重物的外骨骼,或用于恢复和增强手部灵巧度的辅助装置。由于其柔顺、安静且可分布式布置的特性,特别适合与人体长期接触的场景。

更重要的是,其设计原则具有普适性。Cacucciolo 表示:“我们的结论适用于广泛的流体驱动机器人系统。只要使用流体执行器,或者工程师希望用内部泵替代外部泵,这些设计思路都可以迁移应用。”
瑞士洛桑联邦理工学院软传感器实验室教授 Herbert Shea(未参与本研究)评价称,这项工作“在纤维形式软执行器领域取得了重要进展,解决了该领域长期存在的若干关键问题,尤其是在便携性和功率密度方面。”
他强调:“泵没有活动部件,使这些人工肌肉在运行时几乎无声,这对假肢设备和辅助服装而言是巨大的优势。”
Shea 还指出:“这是一项高质量且严谨的研究,弥合了基础流体动力学与实际机器人应用之间的鸿沟。作者不仅对各个组件进行了系统表征,还建立了可预测的物理模型,并通过一系列实验演示验证了该模型,从而给出了完整的系统级解决方案。”
本文根据 MIT 新闻(web.mit.edu/newsoffice/)授权内容整理与改写,该网站专注报道 MIT 的研究、创新与教学相关资讯。









