

美国 Odyssey 发布多智能体世界模型「Agora-1」:人类与 AI 共享同一生成世界的研究预览
美国 AI 公司 Odyssey 发布多智能体世界模型「Agora-1」,支持多名人类与 AI 智能体同时进入同一生成世界,在共享世界状态下进行实时交互,目前以最多 4 名玩家的对战模拟形式开放研究预览。


乒乓球机器人首次在实战中压制顶尖选手,对机器人技术意义重大
索尼AI研发的乒乓球机器人 Ace 在与高水平人类选手的正式对抗中取得优势,被视为人工智能从虚拟环境走向高速、强不确定性现实场景的重要里程碑。

AI 乒乓球机器人“Ace”挑战人类高手,预示更快更灵活机器时代临近
索尼研发的乒乓球机器人“Ace”已能与顶级人类选手对抗甚至取胜,展示了强化学习等 AI 技术如何让机器人在真实体育竞技中达到人类专家水平。
让人工智能在不确定时学会说“我不知道”
麻省理工学院研究人员提出RLCR方法,让大型语言模型在保持甚至提升准确率的同时,大幅改善置信度校准,减少“自信地说错”的情况。

教会AI模型说“我不确定”
一种新的训练方法在不降低性能的前提下,提高了AI模型置信度估计的可靠性,有效解决了推理模型产生幻觉的根本原因。
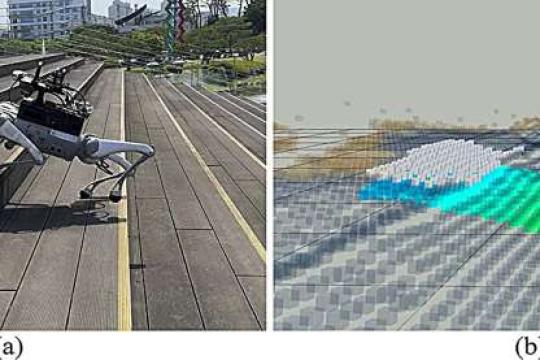
四足机器人“看懂”地形:自主识别危险、规划路线并越障搬运负载
KAIST团队推出四足机器人控制技术“DreamWaQ++”,在原有盲行能力基础上加入视觉与激光雷达感知,实现对复杂地形的主动识别、路径选择和越障行走。
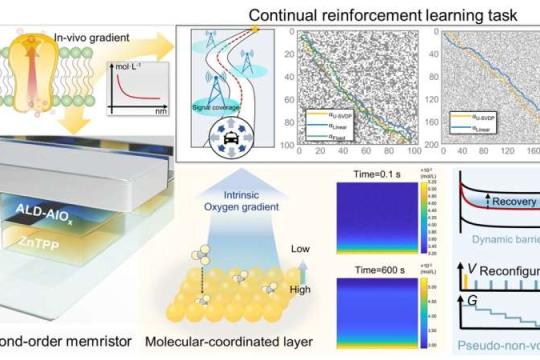
内置氧梯度忆阻器助力强化学习实现更快更稳训练
研究团队在忆阻器中引入稳定的内置氧梯度,实现缓慢且可控的电导演化,并将其映射为强化学习中的自适应学习率,大幅提升学习效率与稳定性。
微型合成游动器首次在复杂流体中实现自主导航
莱比锡大学团队首次证明,微米级合成微游动器可以依靠自身形状“感知”环境,在快速变化的复杂流体中实现无需传统传感器的自主导航,为体内靶向给药等医疗微机器人应用提供了新思路。
Together AI在AI Native Conf大会发布多项研究与产品进展
Together AI在首届AI Native Conf上披露其AI Native云的最新研究到生产进展,涵盖内核、强化学习与推理优化,并介绍公司客户与业务增长情况。
东京科学大学与产综研发布推理型日语LLM「GPT-OSS Swallow」「Qwen3 Swallow」,以开放许可提供
东京科学大学与产总研联合推出两款兼具日语能力与推理能力的大规模语言模型「GPT-OSS Swallow」「Qwen3 Swallow」,基于GPT-OSS与Qwen3改良,采用Apache 2.0开源并允许商用。
新方法有望提升大型语言模型训练效率
通过利用计算资源的空闲时间,研究人员实现了模型训练速度翻倍,同时保持了准确性。
Gradient宣布推出分布式强化学习系统Echo-2
Gradient称,Echo-2可将后期训练成本较传统云端强化学习方式降低最高80%,并支持在多样化硬件环境中分布式运行,以减少对集中式数据中心的依赖。






