

Waymo 于 2026 年 2 月 6 日宣布,基于 Google DeepMind 正在研发的通用世界模型「Genie 3」的最新成果,推出面向自动驾驶的生成式仿真模型「Waymo World Model」。通过生成式 AI 在虚拟空间中重现接近现实世界的交通环境,以提升自动驾驶系统的学习效率和安全性验证能力。
用生成式 AI 重构“行驶世界”的 Waymo World Model
Waymo World Model 是专为自动驾驶开发打造的生成式仿真模型。它以大量真实道路行驶数据为基础,在虚拟空间中重建和生成道路结构、周边环境以及各类交通参与者的行为。
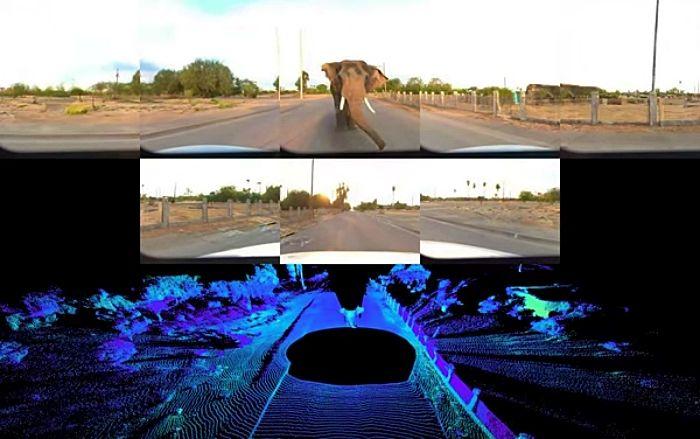
该模型不仅能生成基于摄像头的画面,还支持包含 LiDAR 在内的多传感器数据场景,从而在仿真环境中同时再现多种传感器的输出。借此,开发团队可以灵活扩展用于训练和验证的行驶数据规模与多样性,而不再完全受限于现实世界中可采集到的场景。

将 DeepMind 通用世界模型「Genie 3」应用于自动驾驶
Waymo World Model 的技术基础源自 Google DeepMind 正在研究的通用世界模型「Genie 3」。
Genie 3 的核心特点,是能够在保持世界状态一致性的前提下,对环境进行生成与操控,从而支持交互式的虚拟世界构建。换言之,模型不仅能“生成画面”,还可以在时间维度上保持场景逻辑连贯,让环境对“行动”做出合理反应。
Waymo 在此基础上,针对自动驾驶场景进行了专门优化,将 Genie 3 的世界建模能力聚焦到交通环境的再现上,用于模拟道路、车辆、行人、天气等多种要素的动态变化。
在虚拟空间中生成稀有与高风险场景
借助 Waymo World Model,开发者可以在虚拟环境中构造现实道路上极少遇到、甚至出于安全原因难以实际重现的场景。例如:
- 极端天气条件下的行驶
- 复杂交通流量与异常驾驶行为
- 突发障碍物或不可预期的道路事件
通过灵活组合天气、时间、交通密度以及周围交通参与者的行为模式,Waymo 能够系统性地构建大量多样化的行驶情景,从而显著提升测试与验证的覆盖度。
■ 生成仿真中再现的龙卷风遭遇场景。此类极端天气条件在真实道路上难以安全验证,而在虚拟环境中可以安全地进行生成与测试。

■ 生成野生动物横穿道路的场景示例。虽然在部分地区这种情况确实可能发生,但要在真实行驶中有计划地采集到相关数据非常困难,因此通过虚拟生成进行再现尤为重要。
从依赖实车采集到强化生成式仿真
Waymo 一直采用“真实行驶数据 + 仿真”的组合方式推进自动驾驶开发。此次推出 Waymo World Model,标志着其在生成式 AI 驱动的仿真应用上进一步加码。
通过引入生成式世界模型,Waymo 期望在以下方面取得提升:
- 降低对大规模真实道路采集的单一依赖
- 更高效地构造针对性测试场景
- 加快模型训练与验证的迭代周期
在保持与真实世界数据紧密衔接的前提下,生成式仿真将成为补充与放大数据价值的重要手段,帮助 Waymo 加速自动驾驶系统的开发闭环。
世界模型研究走向实际应用
通用世界模型长期以来主要被视为基础研究领域的前沿方向。Waymo World Model 的发布,展示了这类研究成果在自动驾驶这一高度工程化场景中的一次重要落地。
Waymo 表示,未来将把 Waymo World Model 深度整合进自身的开发与验证流程中,一方面用于系统性地开展安全性测试,另一方面也用于持续提升自动驾驶系统在复杂环境下的性能表现。随着此类世界模型在工业界的应用推进,生成式仿真有望成为自动驾驶研发的关键基础设施之一。









