

乐高积木本身并不“聪明”:不会计算、不用通电,只是通过形状严丝合缝地拼在一起。乔治亚理工学院的一支团队把这种朴素的理念搬到了机器人世界。
乔治亚理工学院丹尼尔·古根海姆航空航天工程学院助理教授邓博磊,与航空航天工程博士生杨欣怡,共同研制出一类微型机器人颗粒。它们可以在没有任何电子元件的前提下,实现彼此的连接、分离和重新组合——完全不依赖传感器、处理器或软件代码。
这项成果登上了期刊《Advanced Intelligent Systems》的封面。
邓博磊并不是“自组织机器”这一概念的首创者。早在 60 多年前,作家库尔特·冯内古特就在小说中描绘过类似的自组织机械系统。如今,邓的目标是把这种科幻设想真正变成工程现实。
“我们的颗粒行为不是由中央控制器来指挥,而是由它们的机械设计和相互作用来决定。”——邓博磊
传统思路中,要让机器人更智能,往往意味着不断叠加复杂度:更多硬件、更强处理器、更长代码。邓和杨则反其道而行之,把这些统统剥离,留下的只有纯粹的机械结构。
杨把这种思路称为“机械智能”。在这里,每个颗粒依靠自身的几何形状来“思考”,而不是依赖传感器或中央大脑。
“智能不是被编程进去的,而是被‘长’在结构里的。只要改变几何形状,就能改变整个群体的行为。”——杨欣怡
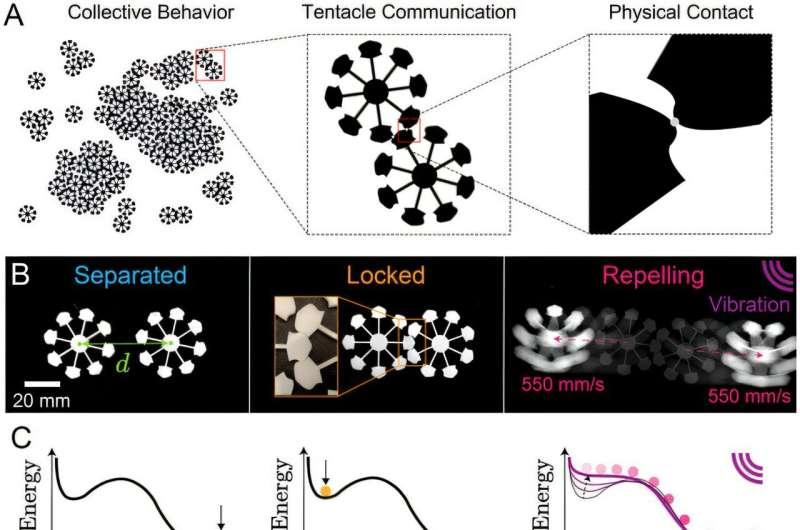
当这些颗粒感受到外界振动时,会自动做出响应。如果把不同形状的颗粒混合在一起,整个群体就会呈现出类似鸟群、蚁群那样的协同行为。
“每个单元都可以非常简单,只遵循简单规则。但当你把足够多的单元组合在一起时,一种智能就会涌现出来。”——邓博磊
无需“大脑”的群体智能
在三维空间中,同样的原则依然成立:形状决定行为。每个颗粒的几何设计决定了它如何推动、锁定或释放周围的颗粒。由此产生的是一种无需信号传输、无需代码的协调运动——交互规则直接被写进了形态之中。
群体中的每个颗粒在设计上完全相同,单独存在时几乎一无是处。
每个颗粒的主体周围均匀分布着柔性的“臂”。当两个颗粒接触时,这些臂会弯曲并锁定在一起,像压缩的弹簧那样储存机械张力。外部振动到来时,储存的张力被释放,臂迅速张开,把颗粒彼此推开,整个群体随之扩散。
扩散的距离和速度取决于这些臂的具体结构。改变臂的曲率,颗粒就会更长时间保持连接;让臂更硬,则释放动作会更迅猛。每个颗粒都遵循同一套简单的机械规则:弯曲、锁定、释放。
微小颗粒,潜力巨大
只需一次振动,就能触发整个系统运转。颗粒会按预先设定的顺序依次断开,每一次机械相互作用都会引发下一次。整个过程不需要中央控制器,拆解顺序已经被“编排”进颗粒之间的物理连接方式中。
这些颗粒可以被制造成截然不同的尺寸——从接近人类头发丝宽度的微尺度,一直到约 1.5 英寸大小。
在最小尺度下,颗粒可以进入血液循环系统。医生可以先将一个紧凑的颗粒群注入血管,再通过超声波等方式施加振动。振动释放臂中储存的张力,颗粒向外扩散,进入单个传统机器人难以到达的细小血管。
邓设想,这样的颗粒群有望将抗癌药物精准输送到难以触及的肿瘤部位,同时尽量避免伤及健康组织,实现对病变细胞的定向打击。
此外,颗粒群还有可能用于绘制血管网络的精细图谱,覆盖范围超出现有医疗成像工具的能力。
“这些颗粒可以探索摄像头或导管无法抵达的血管。你只需发送振动,它们就会扩散到我们无法直接观察的身体区域。”——杨欣怡
类似的思路同样适用于体外环境,尤其是太空场景。在轨道上,即便是小规模维修,也往往需要宇航员穿上笨重的航天服进行高风险太空行走,而强辐射环境也会损伤电子设备。
相比之下,这些颗粒可以以紧凑簇群的形式被发射,抵达目标后再通过振动“解锁”。它们会扩散开来,绕过障碍物并重新配置,无需宇航员亲自外出操作。
由于行为被内嵌在机械结构中,而不是依赖电子元件,这类机器人群体可以在强辐射和极端温度下工作,而传统电子机器人往往会在这种环境中失效。
“在太空中,一旦结构建好,你通常需要宇航员或机器人去改动它。而我们的系统,只需要发出振动信号就行。”——邓博磊
未来方向
目前,邓和杨已经证明,仅凭机械结构就能驱动群体运动。接下来,他们希望把这一理念推向更复杂的层级。
团队正在设计能够对不同振动模式作出差异化响应的关节结构:一次振动脉冲解锁某个关节,另一次脉冲则释放另一部分。这样一来,结构不仅能移动,还能在外界刺激下完成自我重组。整个过程依旧不需要处理器来“决策”,而是由设计本身来决定行为路径。
“当你让设计本身去完成原本由算法承担的工作时,我们才刚刚触及可能性的边界。”——杨欣怡
这正呼应了研究团队最初借鉴的“乐高逻辑”:不依赖电力和电子,只靠形状与结构本身,就能构建出复杂而可靠的系统。









