

筑波大学研究人员近日开发出一种基于仿生事件相机的非接触振动测量方法。该团队对事件相机输出的事件流数据进行几何分析,并引入拓扑数据分析框架,成功重构振动的完整轨迹。研究人员表示,完整恢复振动的振幅与相位信息此前一直是事件相机应用中的难点。
研究团队称,与标准的激光光学振动测量技术相比,该方法在获取难度与成本方面更具优势。相关成果已发表在《应用物理快报》(Applied Physics Letters)。
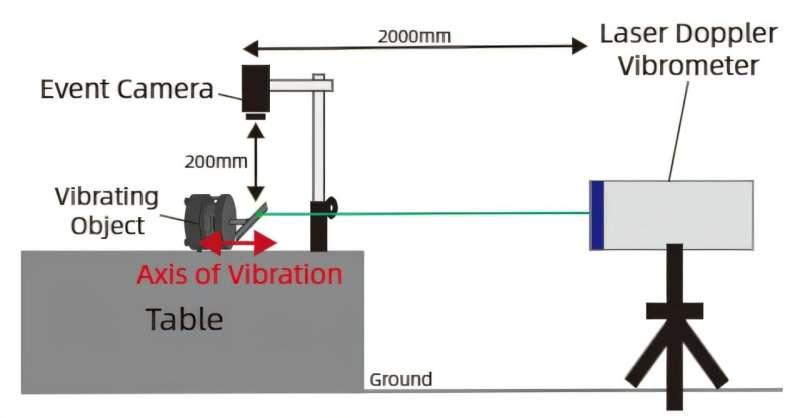
非接触振动测量被广泛用于评估建筑、桥梁、飞机及铁路系统等结构的安全性与可靠性。现有的激光多普勒振动计等基于激光的系统能够提供较高精度,但通常需要昂贵设备并伴随较复杂的安装流程。
作为替代方案,基于相机的振动测量因成本较低而受到关注。不过,传统帧式相机在有限曝光时间内对光线进行积分形成图像。为捕捉高速振动,需要缩短曝光时间,从而减少可检测光量,往往不得不显著提高照明强度,并在高速成像时带来空间分辨率等方面的权衡。
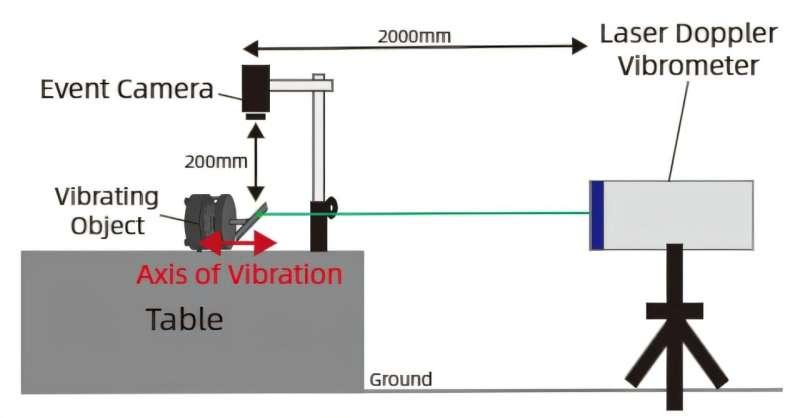
为应对激光系统与帧式相机方案的限制,研究团队采用事件相机开展振动测量。事件相机是一类受蜻蜓等昆虫视觉启发的传感器,可独立记录每个像素的亮度变化,从而在不依赖强光照的条件下捕捉高速运动。
研究人员指出,既有事件相机方案通常能够估计振动频率,但难以准确恢复振幅与相位。此次工作通过拓扑数据分析这一用于识别复杂数据几何模式的数学框架,直接从事件流中重构振动轨迹。团队在调整Mapper算法后,仅凭被动事件相机输入即可对振动的振幅、相位与频率进行精确估计。
此外,研究人员还展示了该方法可使用单个相机同时分离并记录多个声源的能力。
发表评论
登录后才可评论。
去登录









