
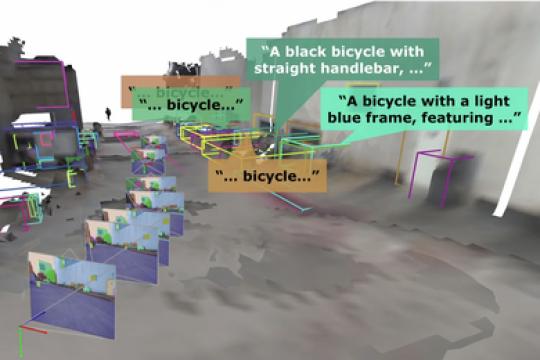
人工智能能帮你找到丢失的钥匙吗?
麻省理工学院研究人员开发了一种新的空间记忆系统,使机器人能够高效捕捉并回忆其探索环境中看到的物体细节。


声纳与摄像融合系统助水下机器人穿透浑浊水域
MIT 与 WHOI 工程师开发出 Sonar-MASt3R 技术,将声纳与光学成像实时融合,使水下机器人在浑浊、低能见度环境中也能构建高精度三维地图并安全导航。

AI健身教练原型可实时纠正动作姿势,有望降低居家锻炼伤害
德雷克塞尔大学与密歇根州立大学团队开发出一款基于人工智能和计算机视觉的原型系统 BioCoach,可在用户锻炼时实时分析动作并给出生物力学层面的个性化反馈,帮助预防居家运动伤害。
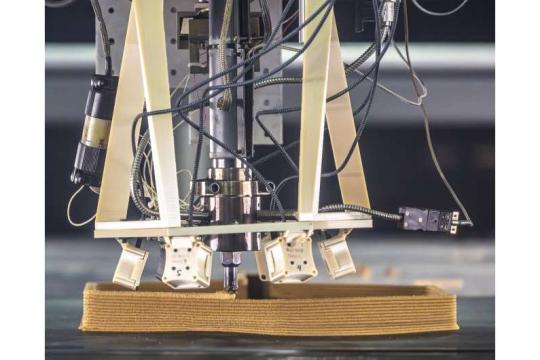
实时错误校正技术助力大型复合材料零件3D打印
美国能源部橡树岭国家实验室开发出一套自动化控制工具,可在大型塑料复合材料3D打印过程中实时监测并纠正温度偏差,减少缺陷和浪费,提升美国在增材制造领域的竞争力。

“大蜜蜂计划”推动自然历史藏品数字化研究升级
加州大学圣塔芭芭拉分校牵头的“大蜜蜂计划”联合美国13家机构,拟建立逾100万张蜜蜂标本高分辨率二维与三维图像及带注释的性状数据集,并通过机器学习、计算机视觉与众包等方法,探索自然历史藏品在人工智能与大数据时代的研究路径。

受人类视觉发育启发的新流程或将改进计算机视觉模型训练
研究团队提出一种名为“发展视觉饮食”(DVD)的新训练流程,通过模拟人类视觉发育过程,让计算机视觉模型更依赖形状而非纹理,从而在鲁棒性和泛化能力上取得提升。

乒乓球机器人首次在实战中压制顶尖选手,对机器人技术意义重大
索尼AI研发的乒乓球机器人 Ace 在与高水平人类选手的正式对抗中取得优势,被视为人工智能从虚拟环境走向高速、强不确定性现实场景的重要里程碑。
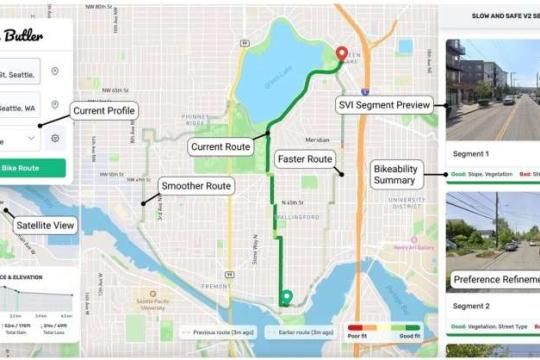
BikeButler 地图:依据限速与路况偏好为骑行者定制个性化路线
华盛顿大学团队开发了 BikeButler 演示应用,利用街景与 AI 分析路况、绿化和限速等信息,为西雅图骑行者生成符合个人偏好的通勤与休闲路线。
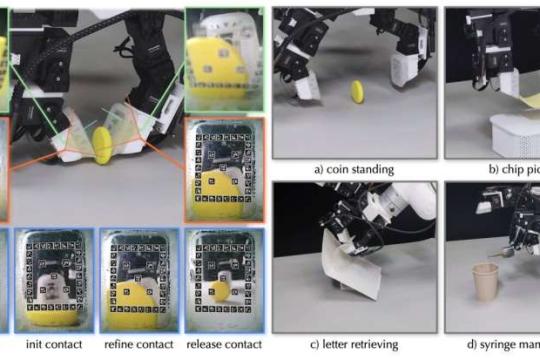
FingerEye桥接触觉与视觉,增强机器人接触前后操作能力
FingerEye是一种集成双目视觉与柔性触觉结构的新型传感器,可在接触前、接触中和接触后持续提供感知信息,从而显著提升机器人在复杂灵巧操作任务中的表现。

新研究:人工智能难以客观量化“美”
弗吉尼亚大学数据科学学院的分析发现,用人工智能给人类外貌打分,更容易放大数据中的偏见,而非揭示所谓普遍的美学标准。

丰田发布自研「Woven City AI Vision Engine」:将城市影像转化为语言理解,在实证都市与交通安全中应用
丰田在实证都市 Woven City 推出全新 AI 视觉引擎,可将街景视频转化为可理解的语言信息,用于城市运营与交通安全支援,并与多种城市级 AI 系统联动。
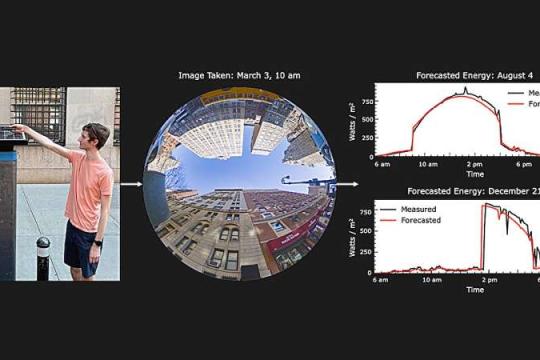
一张照片就能判断:这块城市太阳能板朝向对不对?
研究团队用一台360度相机和一套计算机视觉算法,在纽约街头实测发现:许多城市太阳能板并未处于最佳朝向,仅通过重新调整角度,年发电量就可能提升多达30%。






