

康奈尔大学的工程师研发出一种全新的机器人集体系统,其整体表现更像是一种能够流动、变形并适应环境的材料,而不是传统意义上由精确控制驱动的机器。这个系统被命名为 Cross-Link Collective,由数十个单个能力有限的小型机器人模块组成,但在协同作用下,它们展现出连续、协调且具有韧性的集体运动。
这项成果于 5 月 20 日发表在《Science Robotics》期刊上。研究团队展示了一种类似软物质的机器人系统:在运动过程中,集体可以不断重组和变形,其行为主要由研究人员称为“机械智能”的机制驱动。
通讯作者、康奈尔大学电气与计算机工程副教授、Aref 和 Manon Lahham 讲席教授 Kirstin Petersen 表示:“这个系统并不依赖明确的计算和通信,而是把智能‘嵌入’在机器人的形状以及它们之间的物理交互中。我们利用接触动力学,让有用的行为自然涌现,使系统自发地趋向那些能够减小内部应力、提升运动效率的构型。”
每个机器人模块长度约 200 毫米、宽约 20 毫米,内部配有一个小型电机,使其可以在“I”形和“U”形两种形态之间来回振荡。这种形态振荡会对地面施加周期性作用力,从而让模块缓慢前进并彼此发生碰撞。模块两端装有弱粘性的粘扣带,可以与相邻模块临时连接或分离。
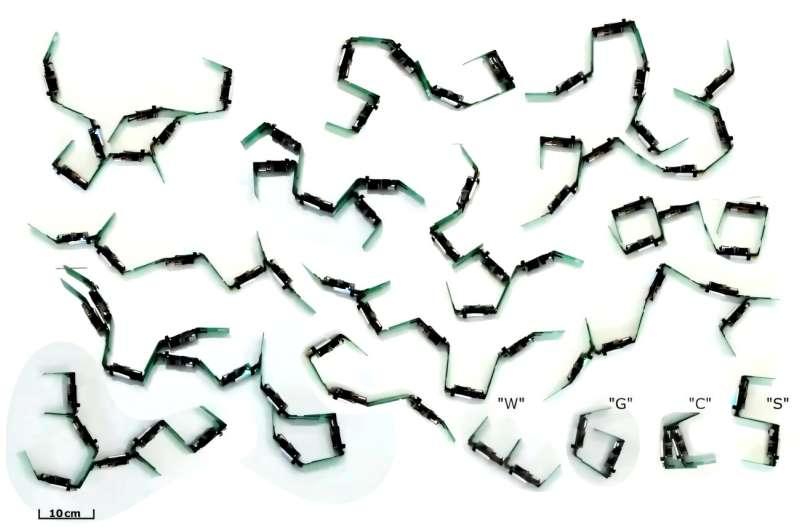
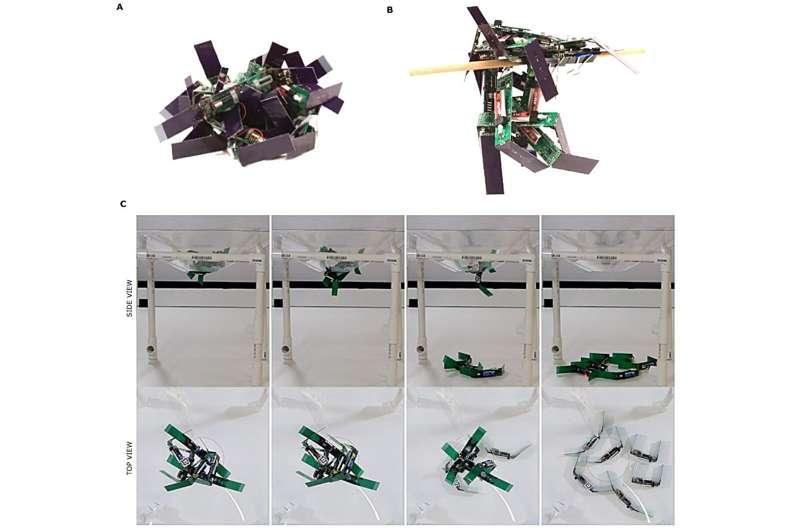
单个模块本身移动缓慢、效率不高。但当多个模块纠缠并形成链状结构后,便会出现明显的集体运动特征:它们会自组织成不断变化的构型,在复杂环境中展现出更强的适应性和鲁棒性。
在倾斜表面上,链状机器人集体的移动比单个模块要稳定得多。单个模块往往因为朝向不同而停滞不前,而集体则能更可靠地沿斜面移动。在布满障碍物的区域中,这个集体的表现更像一种流动的物质:模块之间会连接起来以维持整体结构,又会在必要时断开连接,以避免在狭窄区域发生堵塞。
第一作者、康奈尔电气与计算机工程访问讲师 Danna Ma(M.Eng. ’17,Ph.D. ’25)指出:“即使某个模块的电池损坏,或者因其他原因失效,也不会对整体造成致命影响。系统依然可以正常运作,因为它具备适应能力和冗余性,不依赖任何单一模块。”
尽管整体设计极为简化,研究人员也展示了少量计算如何进一步提升系统性能。为了增强集体的凝聚力,孤立的模块会发出可听见的“求救”声信号,提醒附近的模块减速,从而给落后的模块留出时间重新接入集体。
Ma 解释说:“系统没有集中式的感知或控制。每个模块只需感知自己被碰撞的程度,就能判断是否已经脱离集体。一旦发现自己掉队,它就会发出嗡嗡声,让附近的模块减速,好让自己赶上来。机制就是这么简单。”
该系统中模块的最初设计由佐治亚理工学院的合作者提出。此后,Petersen 和 Ma 通过多年实验和统计分析,对模块结构进行了改进,以增强它们纠缠和大规模协作的能力。在这一过程中,研究团队发现,即便是模块尺寸和其他物理特性上的细微调整,也会显著影响模块之间的连接效率以及整体的集体运动表现。
Cross-Link Collective 的设计灵感来自 活性凝胶——这类材料中的分子连接会不断形成和断裂,但整体结构依然保持连续和完整。研究人员认为,这项工作有望为新型软物质工程提供思路,不过他们目前主要将该系统视为一种研究工具,用来探索机械智能如何在机器人集体中产生具有韧性的涌现行为。
Petersen 表示:“随着机器人越来越多地被部署到高度不确定、动态变化的现实环境中,我们开始认真思考,如何把智能直接编码到系统的物理属性中,这对我们非常关键。看似反直觉的是,当我们放弃对构型和协调的精确控制时,反而获得了出乎意料的多样且有用的行为。”









