

动物在自然环境中的生存依赖有效的攻击与防御策略,但这些行为如何产生并在不同条件下保持稳定,长期以来缺乏统一解释。富山大学研究团队的一项计算研究提出,捕食者与猎物之间看似复杂的互动模式,可能源自简单的感知能力与运动规则,并以稳定的数学形式呈现。
该研究由富山大学解剖学系医学部教授市条浩之、副教授中村智也及医学院学生川村祐一郎等人完成,论文发表于《PLOS计算生物学》。研究团队将博弈论与基于个体的行为模型结合,尝试从数学角度刻画捕食者—猎物策略的稳定性。
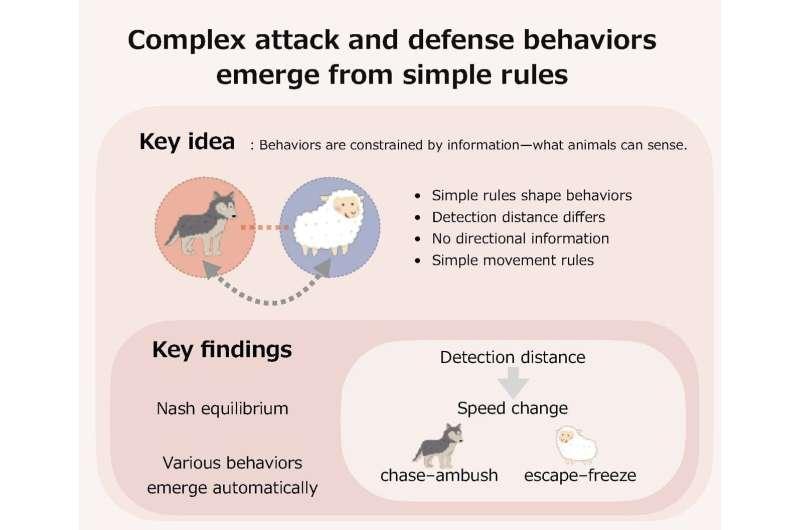
研究人员在模拟中设置“捕食者”和“猎物”代理体,仅赋予其有限的基本能力,包括在一定距离内探测对手,以及根据情境进行加速或减速等运动控制。在此基础上,团队对捕食者—猎物互动进行博弈论分析,发现当感知范围与运动策略处于特定组合时,会持续产生不同但稳定的行为结果。
研究称,即便在上述简化条件下,模型仍能再现自然界常见的行为类型,包括捕食者的追逐与伏击,以及猎物的逃跑与僵住。模拟结果显示,当猎物能够在更远距离探测到捕食者时,逃跑更可能成为稳定策略;而在某些捕食者的感知条件下,伏击或追逐则更具优势。市条浩之表示,纳什均衡可用于解释这类稳定的捕食者—猎物行为,即在该状态下,捕食者或猎物任何一方单方面改变策略都难以改善结果;同时,这些稳定行为并不依赖复杂假设,而可由基础感知与运动机制产生。
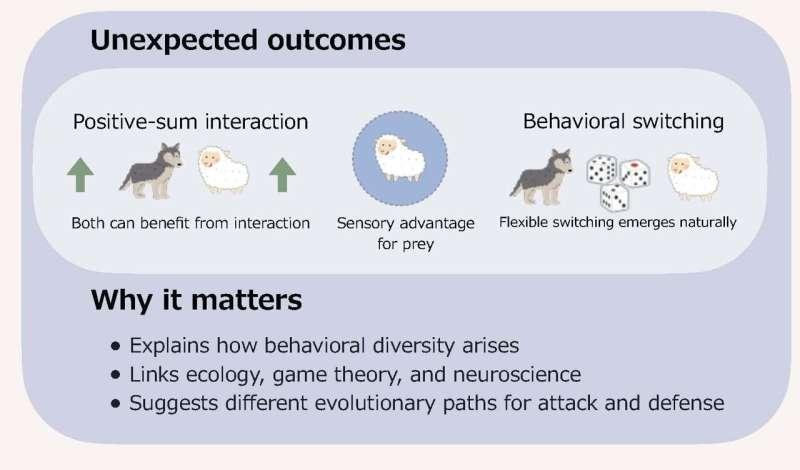
研究还指出,捕食者—猎物互动并非在所有情形下都呈现严格的“零和”竞争。在多种模拟条件下,捕食者与猎物可能同时获得收益,这与传统“胜者与败者”的简单划分不同。研究举例称,当捕食者能够从更远距离探测到猎物时,双方竞争会加剧,但在某些情况下,这种变化反而与猎物种群更好的存活表现并存,尽管捕食者仍能成功捕猎。
研究团队认为,感知能力的细微差异可能触发行为策略的显著转变,例如猎物在逃跑与僵住之间的选择,或捕食者在追逐与伏击之间的切换。市条浩之表示,该研究旨在提供理解自然环境中动物行为的一般框架,为解释策略为何出现并保持稳定提供理论基础,并可能对未来机器人与人工智能应用带来启示。
研究结论强调,通过识别支配捕食与防御互动的纳什均衡,能够将个体层面的行为机制与系统层面的稳定性联系起来,从而为理解自然界中捕食者与猎物的相互作用提供一种可检验的理论路径。









