

大象鼻部皮肤结构为可重构软体机器人提供新思路
研究发现,大象鼻子上下表面的皮肤在刚度与触觉功能上高度分工,这种“护甲+柔性抓握”的组合为新一代软体机器人抓手设计提供了仿生蓝图。

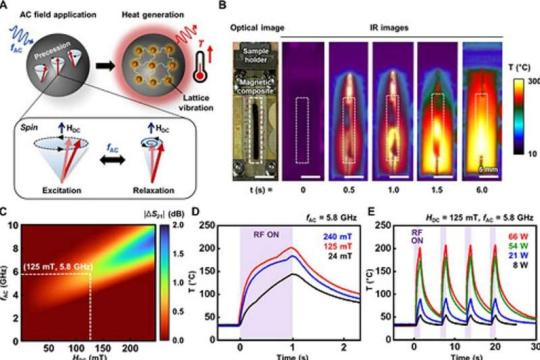
可磁控运动并按需自毁的双模磁性弹性体
研究团队开发出一种在同一材料体系内即可实现远程驱动又可快速降解的双模磁性弹性体,为在极端或难以回收环境中使用的软体机器人和安全电子设备提供了新方案。
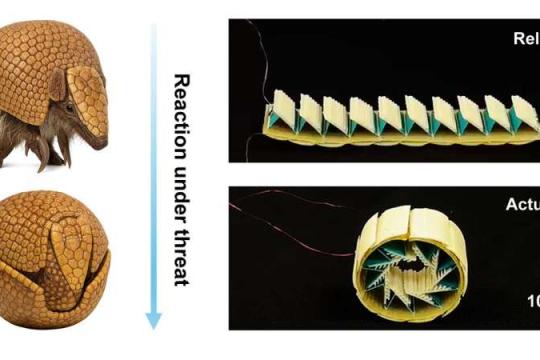
受犰狳启发:软体机器人外壳可瞬间从柔软变为坚固护盾
研究团队仿照犰狳的防御方式,设计出一种能在受外界刺激时自动卷曲成保护球体的软体机器人结构,可为电子设备等载荷提供从轻触到强冲击的多级防护。

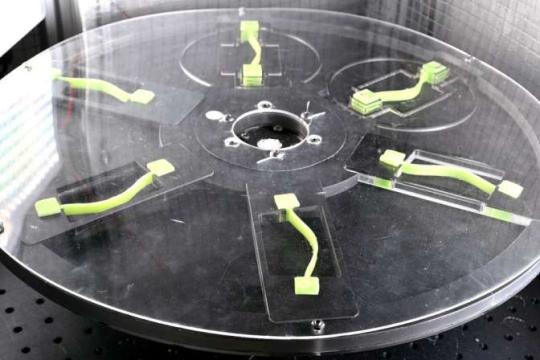
豌豆大小液态金属泵:低于 0.1 伏驱动机器人蝴蝶
布里斯托大学团队开发出一款仅豌豆大小、工作电压低于 0.1 伏的液态金属软泵,可为软体机器人和可穿戴设备提供轻量、柔性的新型动力方案。
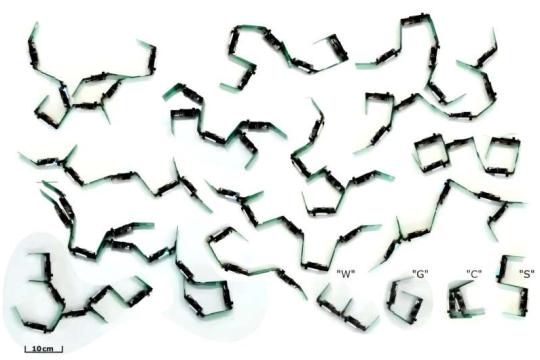
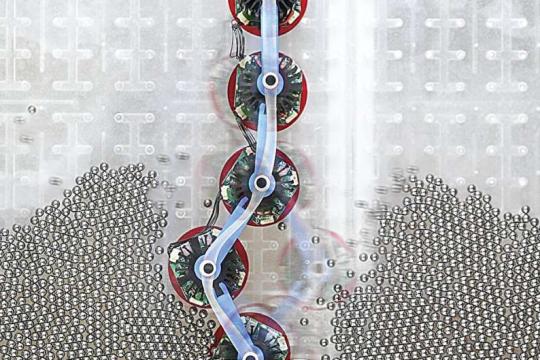
如流体般自组织的机器人集群:无需中央控制即可适应环境
康奈尔工程师打造了一种名为 Cross-Link Collective 的机器人集体系统,由大量机动性有限的小型模块组成,却能像软物质一样流动、重塑并适应复杂环境,全程无需集中控制。

新型折纸曲面壳体:让平面薄片变成可承载的三维结构
麦吉尔大学团队提出一种新折纸图案,可将平面薄片折叠成光滑二重曲面壳体,并通过内部“电缆”式腱索在柔软与高刚度之间切换,为应急帐篷、软体机器人和智能织物等应用提供新的结构设计思路。
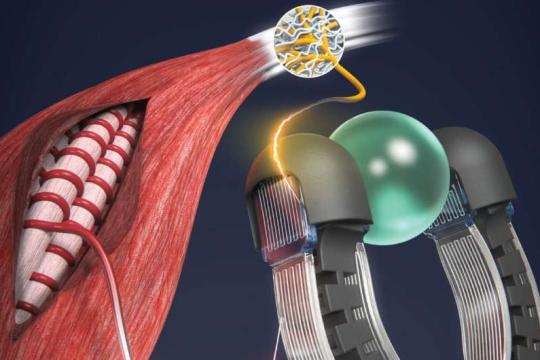
集成感知与驱动的智能人工肌肉,为类人机器人带来新突破
研究团队仿生肌肉-肌腱复合体结构,在液晶弹性体中嵌入液态金属通道,开发出可同时驱动与感知的“智能人工肌肉”,有望应用于下一代类人机器人与软体机器人。
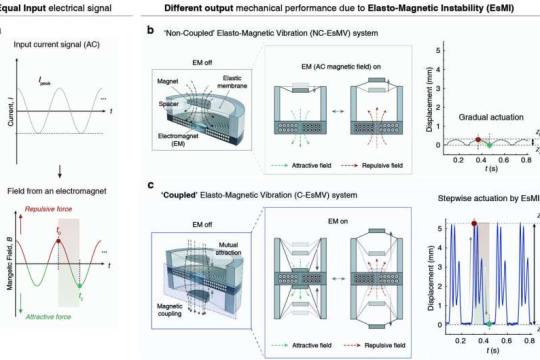
从运动放大到触觉记忆:研究人员打造具机械记忆的软体驱动系统
研究团队利用磁力与弹性膜之间的弹磁不稳定性,实现软体驱动器的运动放大与外部触发机械记忆,为节能、可编程软体机器人与机械信息存储提供新思路。
科学家用旋转“写入”材料记忆
研究团队利用旋转产生的离心力和欧拉力,一次性为多根双稳态弹性梁“写入”机械比特,实现对机械超材料的全局编程,为机械计算与软体机器人带来新路径。

微型结节软体机器人:会跳会飞还能把种子“钻”进土里
宾夕法尼亚大学团队利用可编程纤维和结的拓扑结构,打造出一种无需电子元件驱动的微型软体机器人,能在受热后猛烈跳跃、旋转、滑翔,并将附着的种子高压“打桩”式植入土壤。
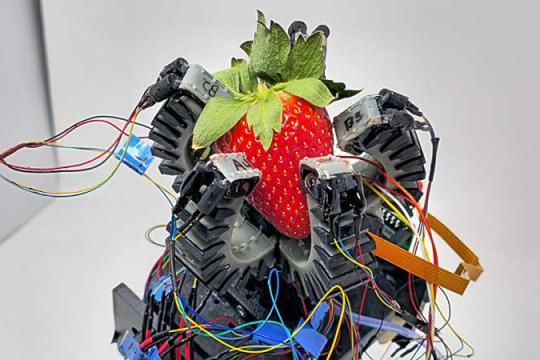
软体机器人夹持器:用“触觉”无损采摘成熟果实
康奈尔大学团队利用可拉伸光纤传感器,打造出一款具备精细触觉的软体机器人夹持器,可通过触感判断草莓成熟度,并在不损伤果实的前提下完成采摘,为更具韧性和生态友好的农业生产提供新工具。
这些“活性材料”会弯曲、断裂,还能自己爬行、行走和挖掘
除了金属、混凝土和橡胶等被动材料外,科学家正用马达、杆和橡皮筋在实验室中打造能自行响应和运动的“活性物质”,它们在压力下不仅会弯曲和断裂,还能重复振荡、爬行甚至挖掘,并挑战传统的勒夏特列原理。






