

牧羊犬长期被培育用于在开阔地带控制大群绵羊。早在 19 世纪 70 年代的牧羊比赛中,人们就已经展示了这种能力:驯养员通过一连串哨声指挥训练有素的牧羊犬,引导一小群绵羊穿越田野,有时还能将羊群干净利落地分成两组。不过,绵羊的反应并不总是可预测的。
佐治亚理工学院的研究团队系统研究了驯养员与牧羊犬如何协作,来管理这种行为多变的羊群,并从中提炼出一套远超畜牧业本身的普适原理。
在发表在《科学进展》(Science Advances)封面上的一项研究中,研究人员将这些观察转化为计算机模型,展示了类似的策略如何用于改进机器人群体、自主车辆、人工智能代理以及其他需要大量个体在不确定环境中协同行动的网络系统的控制方式。
群体运动的动力学
“鸟类、昆虫、鱼类、绵羊以及许多其他生物之所以成群移动,是因为这对个体有利,比如能降低被捕食的风险。”佐治亚理工学院化学与生物分子工程学院副教授 Saad Bhamla 解释道,“难点在于,‘群体’并不是一个整体,而是由许多个体组成,每个个体都在做局部且并不完美的决策。”
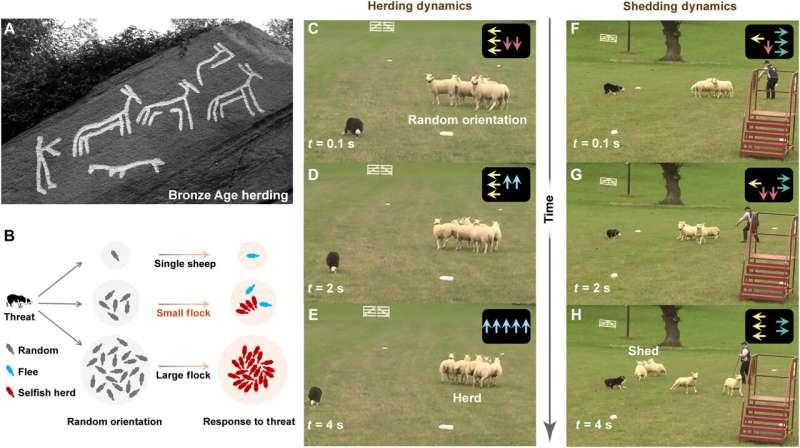
当捕食者逼近羊群时,处在边缘的个体往往会向中心靠拢,以降低自身风险。Bhamla 称这种现象为“自私的群体”行为。牧羊人正是利用训练有素的牧羊犬来触发和放大这种本能反应。
通过分析数小时的牧羊比赛视频,研究人员发现:与大群相比,小群绵羊反而更难控制。在较大的羊群中,更多个体被包裹在中心区域,整体表现得更为一致,因为动物们在“跟随群体”和“躲避牧羊犬”这两种本能之间不断切换。
“这种在两种本能之间的切换,使得群体行为变得难以预测。”前 Bhamla 实验室博士后、该研究的共同负责人 Tuhin Chakrabortty 说。

然而,团队在仔细观察牧羊犬与驯养员如何引导小群绵羊时发现,这种不可预测性并不总是坏事。“在合适的条件下,这种‘噪声’反而可能成为一种优势。”Bhamla 指出。
牧羊成功的关键模式
在实际操作中,牧羊犬驯养员会根据绵羊对犬只施加的威胁压力有多敏感,对羊群进行分类。有些绵羊对压力极为敏感,压力稍大就会惊慌失措;另一些则对轻微压力几乎无动于衷,需要牧羊犬在更靠近、更强势的位置施压才能起作用。
研究人员观察到,有效的控制通常遵循一个两步节奏。第一步,当绵羊大多处于静止或缓慢移动状态时,牧羊犬通过位置和动作的微调,悄然改变羊群的整体朝向。第二步,当羊群的朝向被调整到期望方向后,牧羊犬再加大压力,促使羊群整体开始移动。
这些动作的时机至关重要,因为在小群体中,由于个体不断在不同本能之间切换,群体内部的对齐状态往往转瞬即逝。
“在我们的模拟中,加大压力确实能让羊群更快达到目标朝向,但群体能保持这种对齐状态的时间,主要由噪声大小决定。”Chakrabortty 解释说,“换句话说,牧羊犬可以帮助群体做出方向决策,却无法无限期维持这个决策,因此时机就变得非常关键。”
计算机模型与策略迁移
为了理解这些行为背后的普适机制,研究团队构建了一个计算机模型,用来刻画绵羊对牧羊犬以及对同伴的反应。借助这个模型,研究人员可以在“个体独立决策且环境不确定”的前提下,系统测试不同的引导策略。
随后,他们将这些理念迁移到机器人群体的模拟中。通常,工程师会设计让每个机器人在行动前整合来自所有邻近机器人的信息,再做出移动决策。Bhamla 指出,这种“信息平均”策略在信号清晰时表现良好,但在信息嘈杂或相互矛盾时,效果就会明显下降。
为说明为何“切换策略”在嘈杂环境中更有效,研究人员给出了一个类比:想象一个烟雾弥漫的房间,只有一个人能看见出口,但没人知道是谁。如果每个人都向周围打听并对所有意见取平均,那么那条唯一正确的路径就会被大量错误信息稀释掉。
“这正是反直觉之处:当只有一个人掌握正确信息时,平均处理会把信号冲淡。但如果大家一次只跟随一个人,并不断更换跟随对象,那么正确的信息就有机会在群体中传播开来。”Bhamla 说。
基于这一思路,研究人员在模拟中测试了一种受绵羊“切换行为”启发的控制策略:每个机器人在任一时刻只关注一个信息源(要么是外部引导信号,要么是某个邻近机器人),并在下一步中切换到另一个信息源。
在高度嘈杂的条件下,这种“切换式”策略比传统的“信息平均”策略或固定的“领导—跟随”策略更省力地维持了群体沿目标路径前进。
研究团队将这一方法命名为“犹豫群体算法”。这个名称强调了一个看似矛盾的洞见:允许影响力在个体之间随时间不断转移,反而能让群体在不确定环境中更容易被引导。
“我们的结果表明,那些让小型动物群体看起来难以预测的动力学特征,可能正是设计和控制复杂工程系统的新资源。”Bhamla 总结道。









