

在物理学中,“中尺度”处于微观与宏观之间,既不同于以惯性主导的宏观世界,也不同于以粘性效应占主导的微观世界。该尺度下的运动同时受到惯性与粘性影响,被认为需要不同于传统两端极限情形的描述框架。幼虫、虾类和水母等小型生物的活动,正发生在这一尺度范围内。
阿尔托大学应用物理系研究人员近日在期刊《Communications Physics》发表论文,报告其对中尺度生物游动机制的实验观察与测量结果。研究团队由助理教授 Matilda Backholm 领衔,成员来自多学科背景。
研究人员指出,在粘性与惯性混合的中尺度环境中,实现更有效的推进并不单纯依赖“更快”或“更大”的运动方式,而与一种非对称运动特征相关,即“时间反演对称性破缺”。团队认为,这一发现补充了中尺度游动相关的基础物理认识,并可能为“中尺度机器人(mesorobotics)”等应用提供参考。
以盐水虾为对象的直接测量
研究团队选取体长约 400 至 1500 微米的盐水虾(Artemia)作为观测对象,并在其游动过程中测量其对连接于悬臂梁装置产生的作用力。
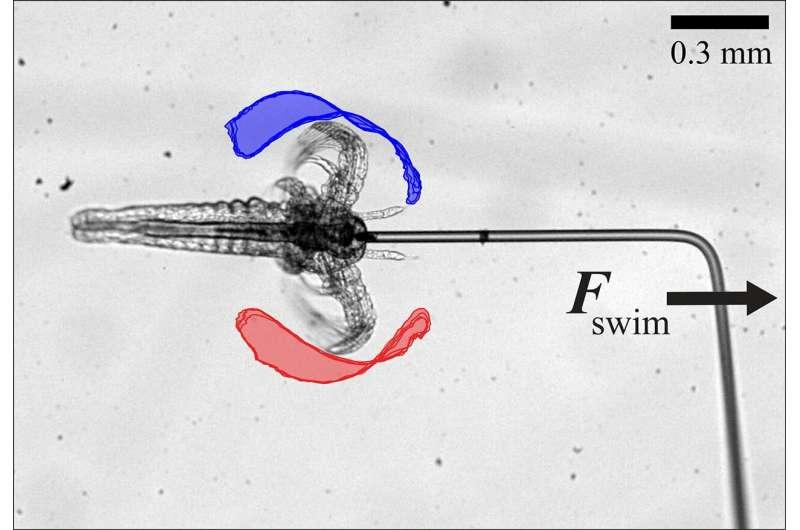
博士研究员 Sharadhi Nagaraja 表示,盐水虾在游动时会弯曲触角上的关节状结构,其运动轨迹呈“数字 8”形。研究人员据此对该运动范围进行量化与测量。团队认为,“数字 8”形运动为其运动增加了一个自由度,并体现出时间反演对称性被打破。
Backholm 解释称,在高粘度主导的微观流体环境中,时间反演对称性破缺被视为游动者获得净位移的基本要求;而在中尺度环境中,这一条件并非必需。不过,研究人员观察到盐水虾仍会通过触角运动表现出这种破缺特征。
研究团队进一步报告称,盐水虾的时间反演对称性破缺程度越高,其游动效果越好、推进力越大。Nagaraja 表示,这是此前尚未能对活体生物直接测量到的现象。
机器学习与微吸管力传感器辅助分析
为获得更完整的数据,团队拍摄了盐水虾大量运动帧,并使用机器学习方法进行分析。研究人员称,对这类生物体的操控与测量需要物理学与生物学的交叉配合,同时依赖 Backholm 团队正在开发的微吸管力传感器。
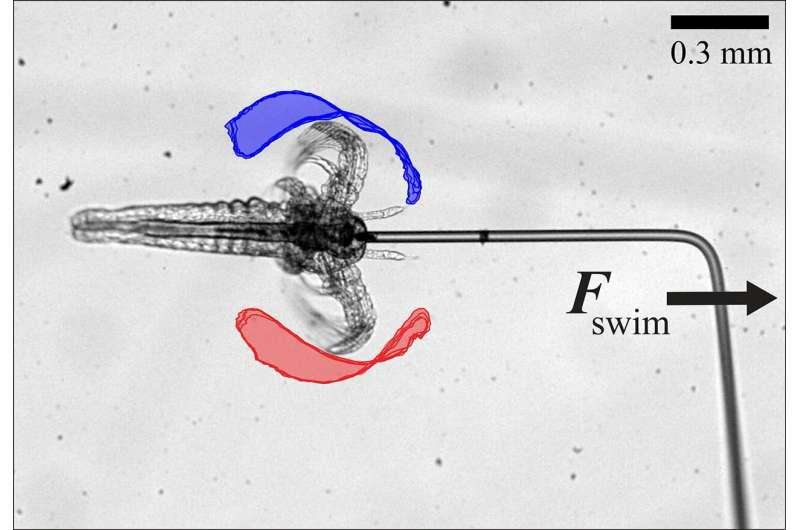
博士后研究员 Rafael Ayala Lara 表示,该微吸管力传感器适用于对活体中尺度生物进行直接游动力测量,能够在不伤害游动者的情况下完成测量,并支持在保持时间分辨率的同时记录游动动作。
面向医学应用的潜在启示
研究人员认为,对中尺度游动物理的理解有助于工程师构建并编程中尺度机器人,用于医学等场景。Backholm 表示,相关设想包括制造可在体内将药物送达特定位置的微型机器人,例如将毒素直接递送至肿瘤部位,以避免对全身造成影响。她同时指出,相比微观尺度的机器人,中尺度机器人有望携带并输送更多药物。
Backholm 还表示,自然界经过长期演化已形成高效率的游动方式,而工程领域对这些机制的理解仍在推进之中。









