

Chef Robotics在餐饮自动化“坟场”中突围,累计完成1亿份食品分装
这家部署人工智能引导机器人手臂的公司,正从大型食品制造和机构客户起步,逐步向更小型厨房和多元场景扩展。


机器人初创公司Physical Intelligence发布新模型π0.7 称可完成未显式训练任务
旧金山初创公司Physical Intelligence发布新模型π0.7,称其在组合泛化方面出现“早期迹象”,可在自然语言分步指令下完成未曾明确训练的机器人任务。
仿真初创公司Antioch获850万美元种子轮融资,瞄准“物理人工智能”开发工具市场
Antioch完成850万美元种子轮融资,估值约6000万美元,计划为新一代机器人开发者提供高保真仿真平台,以缩小“仿真到现实”差距。

Unitree 发布可载人变形机器人「GD01」:起售价 65 万美元,号称已做好量产准备
中国机器人企业 Unitree Robotics 发布可载人变形机甲 GD01,起售价 65 万美元(约 390 万元人民币),官方称其为“全球首款已做好量产准备的载人机甲”,但目前详细技术规格与应用场景仍有限披露。

富士通与卡内基梅隆大学共建“物理AI”联合研究中心 成果将自2026年度起陆续融入「Fujitsu Kozuchi Physical OS」
富士通与美国卡内基梅隆大学成立“Fujitsu-Carnegie Mellon Physical AI Research Center”,围绕机器人、传感器与空间一体化的物理AI技术展开联合研发,并计划自2026年度起将研究成果逐步导入开发中的「Fujitsu Kozuchi Physical OS」平台。
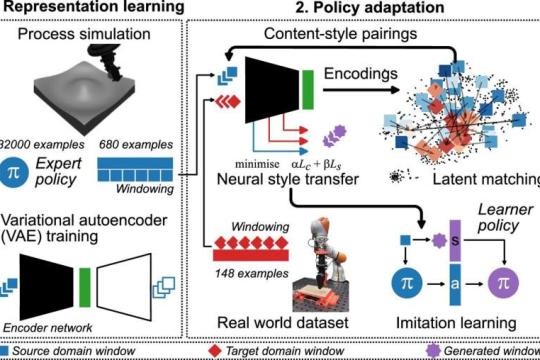
新型AI训练方法助力机器人将实验室技能可靠迁移到现实环境
研究团队提出一种结合仿真与少量真实数据的AI训练方法,有望缩小“仿真到现实差距”,让机器人在复杂、不确定的真实环境中更稳定地执行切割等物理交互任务。

等待近40年的三面拉链概念,终于被技术实现
1985年提出的三面拉链构想,在麻省理工学院研究团队的推动下,终于通过3D打印和自动设计工具变成现实,可在柔软与刚性之间快速切换,为帐篷、医疗器械和机器人等带来全新设计方式。

乒乓球机器人首次在实战中压制顶尖选手,对机器人技术意义重大
索尼AI研发的乒乓球机器人 Ace 在与高水平人类选手的正式对抗中取得优势,被视为人工智能从虚拟环境走向高速、强不确定性现实场景的重要里程碑。

日本加速部署物理人工智能 以应对劳动力短缺
在劳动力持续收缩背景下,日本正将物理人工智能从试点推向大规模应用,重点落在制造、物流和关键基础设施等领域。

当机器人开始跑马拉松、打乒乓:它们能真正成为体育传奇吗?
类人机器人打破半程马拉松人类纪录、AI 机器人击败顶级乒乓球选手,这些看似“机器人战胜人类”的时刻,其实更关乎机器人如何在复杂运动环境中学习与适应,以及这将如何反过来提升人类运动表现。
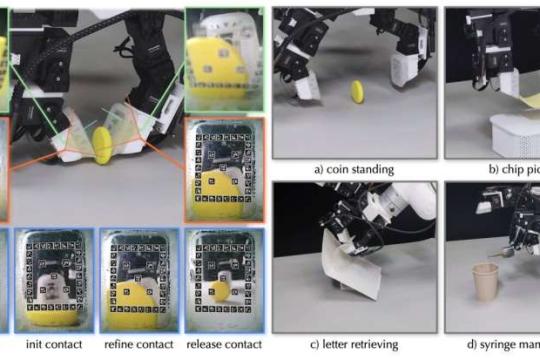
FingerEye桥接触觉与视觉,增强机器人接触前后操作能力
FingerEye是一种集成双目视觉与柔性触觉结构的新型传感器,可在接触前、接触中和接触后持续提供感知信息,从而显著提升机器人在复杂灵巧操作任务中的表现。

南卡罗来纳州沼泽地研究揭示萤火虫同步闪烁规律
科罗拉多大学博尔德分校研究团队通过LED光源实验建立“相位响应曲线”,描述前额萤火虫如何在外部信号影响下调整闪烁节奏,为理解生物同步现象及群体机器人协作提供线索。






